







She will have many motors per arm for an amazing range of motion. Making her walk will be a huge undertaking. I found some powerful linear actuators that I hope to use. I was going to build a full scale Cylon robot, but I think an android will be more of a challenge.
By David mcsdaver
— Last update
Discover more robots

Luis's Multiple Sensors On One Uart
Integrate a dual-axis compass, four HC-SR04 ultrasonic sensors and an Arduino Pro Mini with EZ-B4 for robot orientation...

Jstarne1's Omnibot 2000 , Rad 2.0 Vacuum Bot
Modding two Omnibots (regular and 2000) with two EZ-B kits; rad base shelved for noise but may return if drivetrain...

Ezang's Mr. Conehead Dancing, Take 1 - I Will Try More...
Stabilize hard-to-balance Mr. ConeHead for dancing, preparing for Take 2.

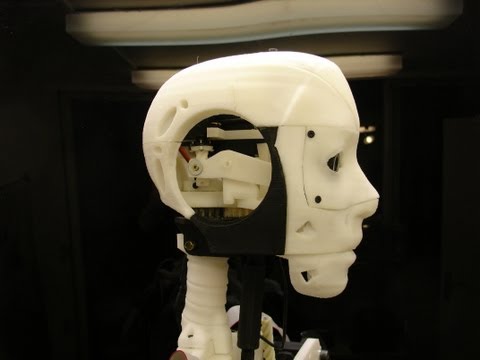
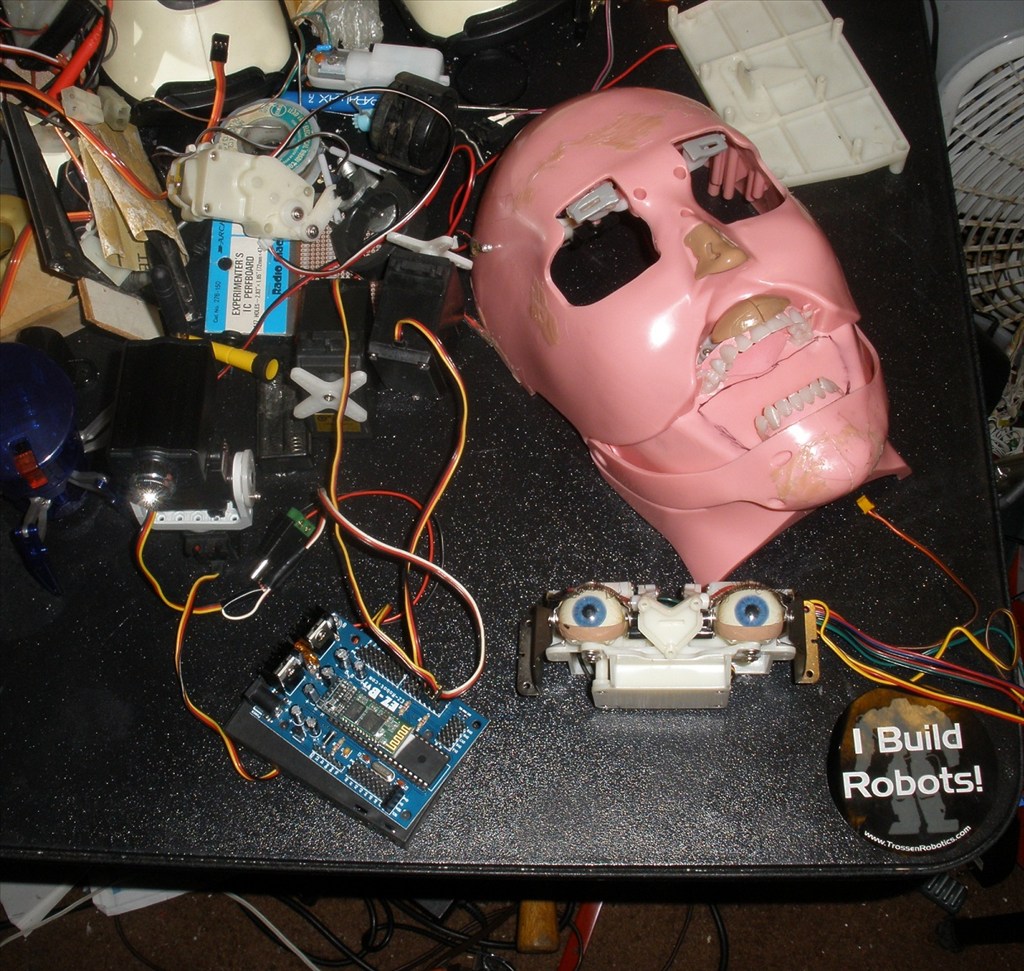
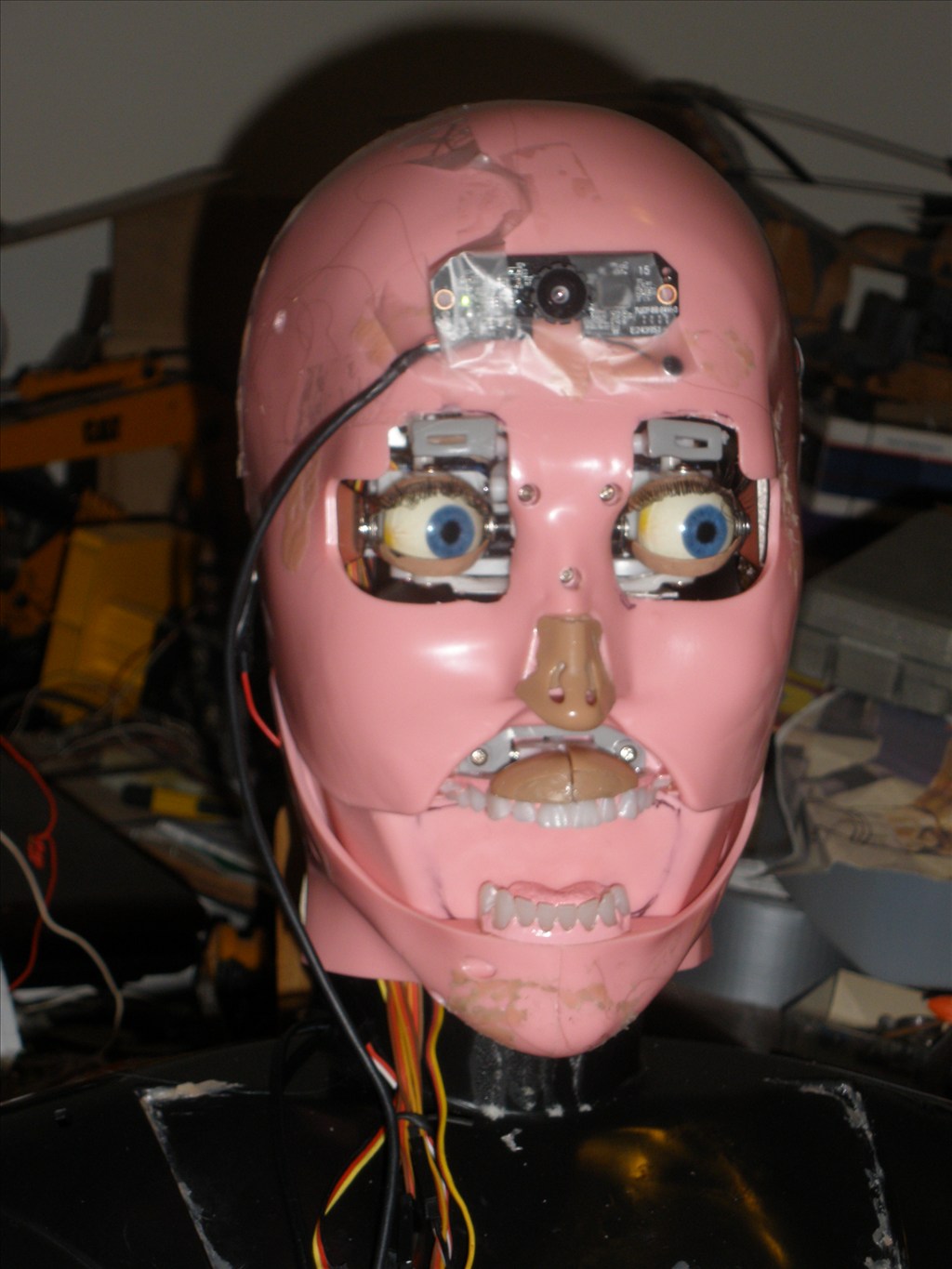
The eyes from Elvis will make adding an in eye camera very hard.
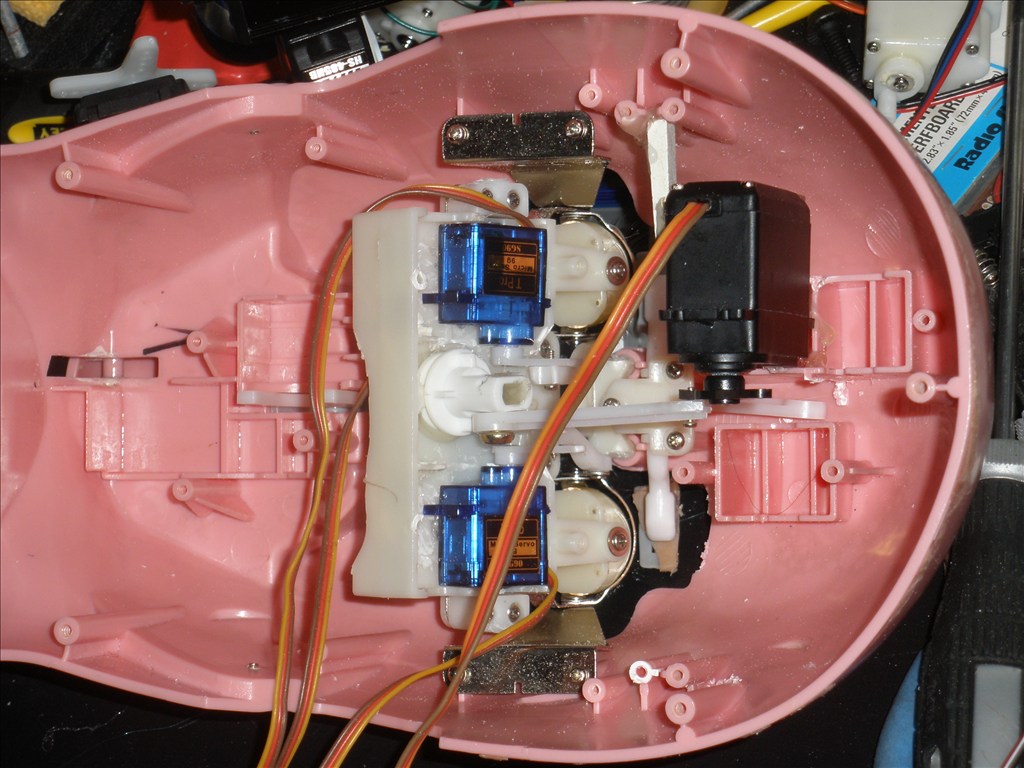
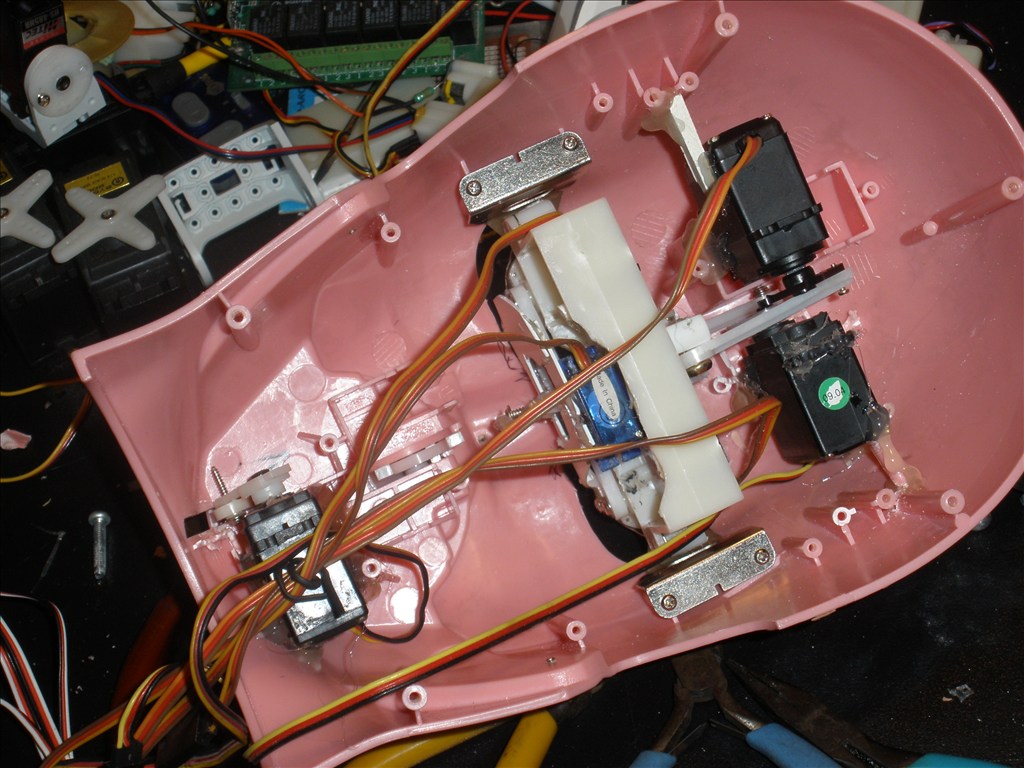
I am replacing all of the motors with servos. I would need to take apart good servos to use the control boards to control the Elvis motors. So why not just use the servos. I know they will work well with the EZ-B.
I will be making a latex face that will have moving eyebrows, lips, eyelids, mouth and eyes. I am still working on how I will make her head turn L/R and U/D as well as tilt side to side. The Elvis robot could do all of that, but the motors were large and loud. I found out the Elvis robot could have winked one eye at a time had they wanted it to. I may need to rebuild the eyes completely to add eye cameras. I have a small pin hole camera on order as well as 10 micro servos. I have latex for the skin already so I will be working on making a mold for her face. Then every part will be made to fit her latex face. I will be cutting holes to make the plastic skull lighter or I will make a lighter skull.
This will be an interesting build. Are you building an endoskeleton with full latex skin or using the manikin body segments with latex skin over mechanical joints?
Full endoskeleton with latex skin. No part of the manikin will be in the finished android. As I build the head and neck parts will be scaled to the manikin. I may have the android head and arms on the manikin for tests, but the finished android will not have any manikin parts. If I put latex skin over a manikin then the stress at each joint would be too high for much movement. She would be very limited. An endoskeleton with some foam under the latex will be needed to maintain shape and max amount of flexibility. This build will take some time as I will be moving and have many other projects at the same time. Also the cost involved will be higher than any other robot I have ever built.
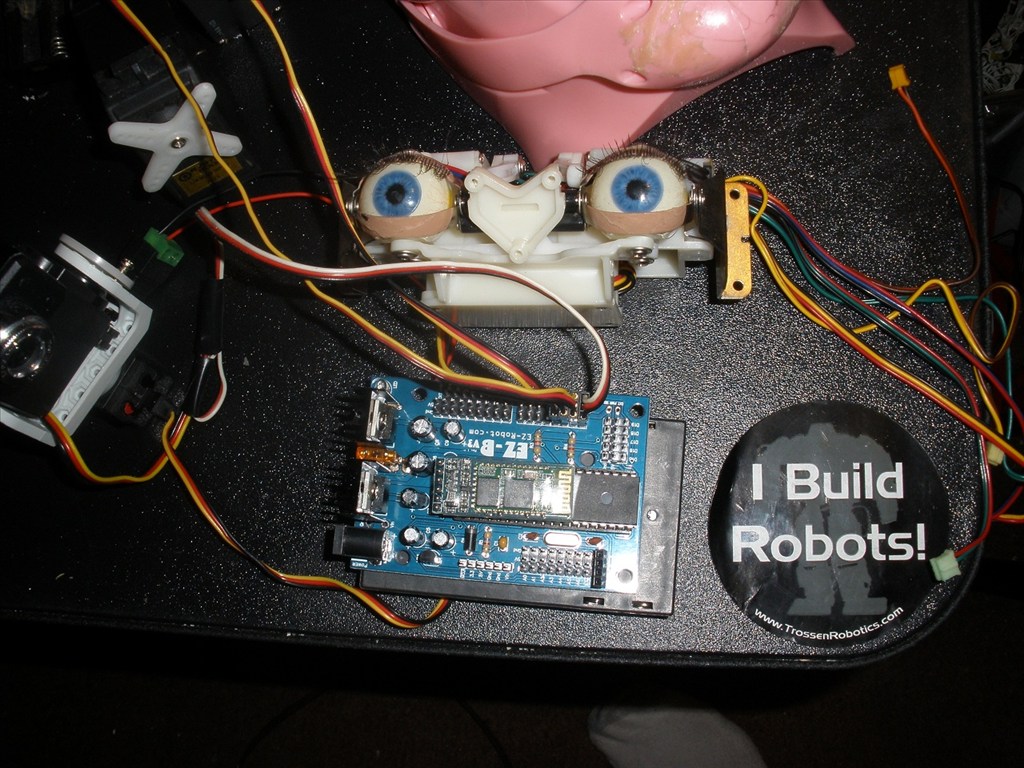
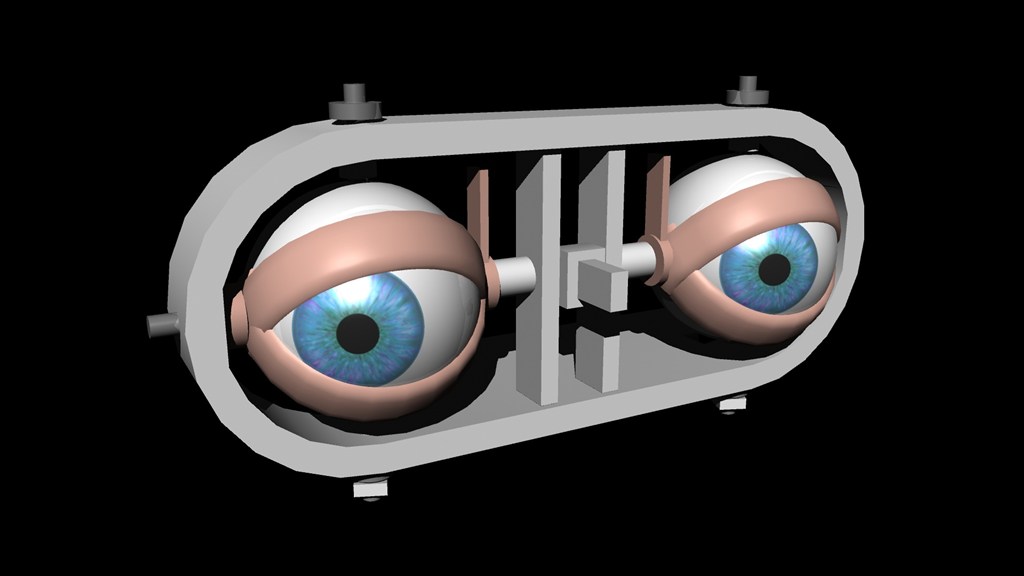
I replaced the Elvis motors with servos for the eyes. The eyes now have greater movement than before.
Hello Jen!
I build mannequin robots too! Have you seen my Robot Betty9? First I used an arduino plus several other systems, now I am using EZ plus Leaf & ALICE (for AI).
My second android project is called: Annadroid. She is based on a friend of mine. I will be using an Elvis for her head.
Elvis's (or is the plural of Elvis, "elvi"?) make great bases for animatronics. I've made several robots using them.
I've got a lot of photos of Betty and the beginnings of Annadroid on my web site:
www.robots-and-androids.com/robot-betty9.html
https://synthiam.com/community/forum/posts.aspx?threadId=1156
I found that it was very hard to mount standard servos inside of Elvis. Instead I use a hybrid for the elvis motors: the original motors + several Hitec 311 servo BOARDS (just the boards) I replace each original hitec pot and motor with an Elvis pot and corresponding motor.
I put hookup instructions on my site as well.
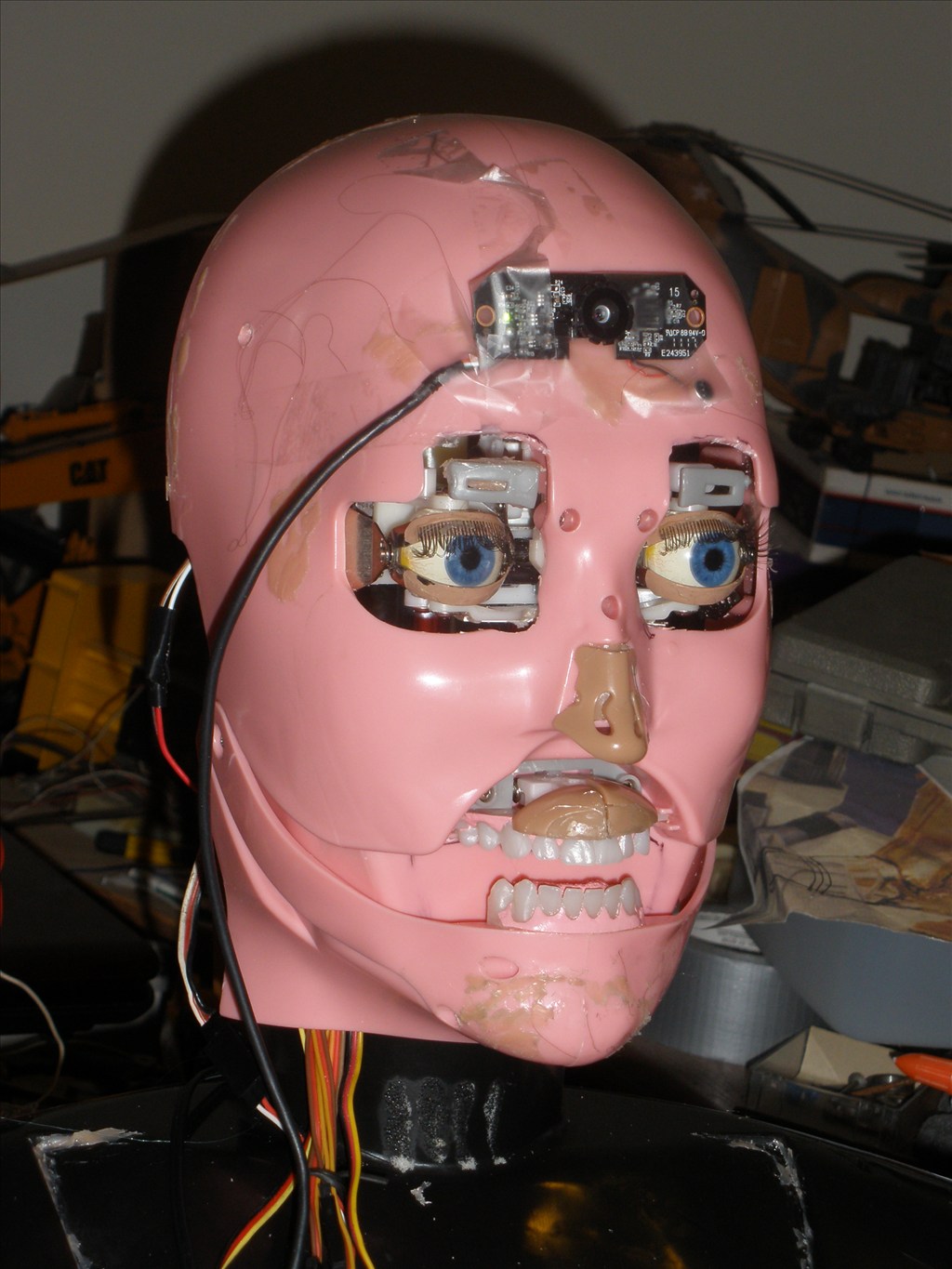
A few months ago I successfully mounted a camera in an elvis eye, but the resolution on that camera was rather narrow. It gave my robot tunnel vision. Also, the eye blink was something that I didn't even think about until I started testing it. Currently I am sticking to a hat-cam or a pendant-cam.
Best of luck to you.
Thomas
I am a friend of Robot Betty9 on Facebook. I have looked at your robot builds. Very nice work. I want the Alice AI and EZ-B to work together for my android. How did you get them working? I have added most of the servos to move everything in the face except the lip servos. It did take a bit of work to get my servos to fit and work, but the movement is better than it was before. The motor to turn the head will no longer fit so I need to find a good replacement servo. This android will need many servos a bunch of EZ-B boards.
I made a short test video of the android so far. It will be a long build. lol I am using my second EZ-B in this build.