
Asked
Calibrate Problem
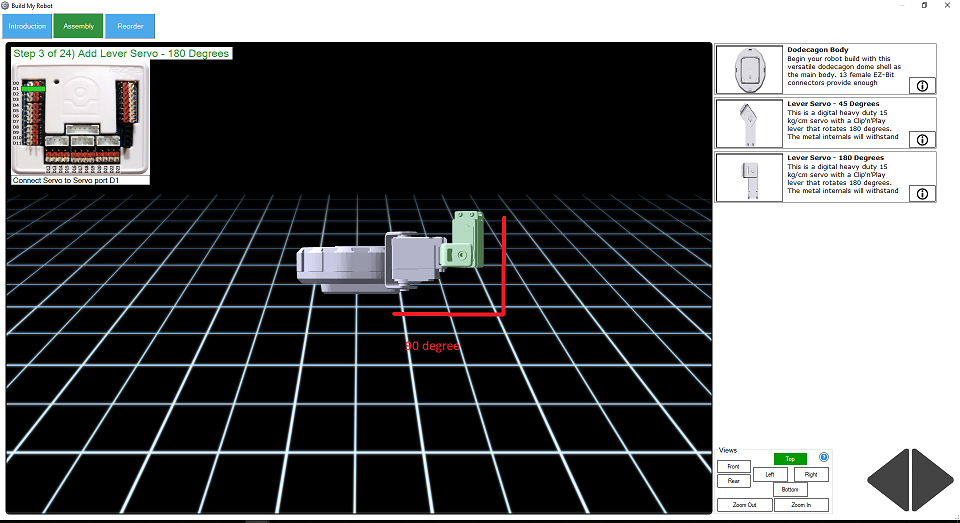
first i choosed six in the list above cause the galapagosbot is not in the list. so here is my problem,aldo i made the galapagosbot before ,i cant seem to find the problem. witsh is he doesn walk good.i cheked all port 3 times,calibrate 3 times stil cant find it. my question is ports d3.d0.d9.d12 are in 45 degree for calibrating.ports d1.d4.d10.d13 are they calibrating in a angle 90 degree? against the other servo's as shown in the instrucktions.walking gait ,the servo's moves backwarts and inwarts?
Related Hardware (view all EZB hardware)

Six Hexapod
by EZ-Robot
Six hexapod robot kit: Canadian-designed, customizable WiFi 6-legged platform with 12 servos/12 DOF for dynamic motion. Available at EZ-Robot.
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24
Related Robot Skill (view all robot skills)

Auto Position Movement Panel (Gait)
by Synthiam
Create servo frames/actions to animate humanoid, hexapod or custom gaits with smooth transitions, SW ramping and directional control

i also notest when there is no ezbv4 connected the volt stays on?
Hello Nomad,
The volt/temp will read the last known value when you press disconnect, this is normal.
I still have the old Galapagos file. I've attached it here for you:
Galapagosbot-v1.EZB
hi jeremie ah ok.many thanks for the download.
jeremie it works.one thing i notest where i think the confusion comes from.you see in the pic ubove, the config is 45 degree while on the web page for calibration is straight forwart insteadt of 45 degree.