jstarne1
USA
Asked
— Edited
I already need to solder leads to a ultrasonic sender and receiver pairs. This is due to limited space inside the Omnibot 2000 claw housing. The idea is to sense when a object is inside the claw so it knows when its OK to grip closed. The spacing is already about 1/2" farther apart and from what I have read the sensors have about a 60 degree angle of view. Here are pics...



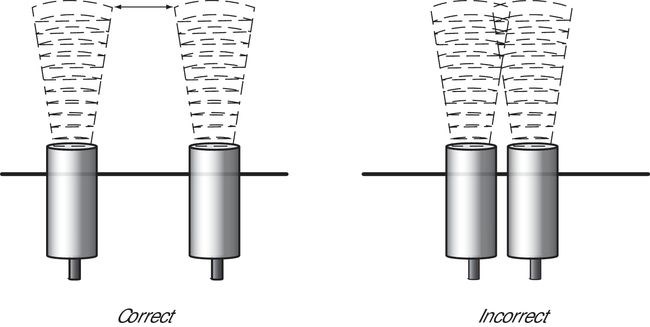

So should i keep the sensors straight or is it optimal to tilt the sensors to be more pointed to the target? Does tilting the sensors slightly help reduce a blind spot? Obviously you see the area is pretty small to detect a bottle or can....
Any idea or info on how much angle is OK till cross talk is a problem? Thanks guys and info you find on the subject is helpful.
Crosstalk?
One side sends a sound out, the other hears it, it then uses the time taken for the "echo" to be heard and converts it to distance... in basic terms.
As far as I know they must be aligned parallel to each other otherwise they wont work.
OK this seems like one of those things that will require tests then , thank you for your input.
You can reduce the cone with a couple of bits of fuzzy felt fitted around each side, google will bring up some suggestions on how to do it since it does need to be pretty specific with the length and material.