
jstarne1
USA
Asked
— Edited
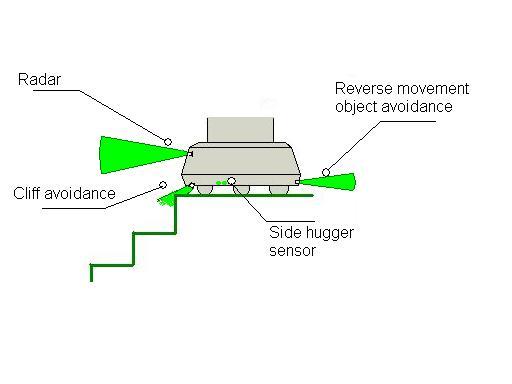
Is sonar a good option to avoid stairs and objects in all conditions? Is there a better option? Does having a couple sensors on same side of bot ( but not aimed in same direction) cause interference?

@btallis spring idea sounds like it could be a idea , I am concerned that would chew up my hardwood floor or get caught on a rug/ carpet all the time however it could be an option. Roomba uses IR LEDs and IR sensor pairs to detect edges. They have 4 , two along front edge and one in each side in front of each wheel. From what I read the ir sensor is on constantly and reads light but once it passes over a edge the light is no longer reflected back which trips sensors signal to change.
I think DJ did something like this on his original Omnibot. I was going to try and use a distance sensor on each side of the front caster. then run a script to compare the values while the robot is running autonomously . maybe this one could do it?
If ( Digital ( [Port] ) [Condition] [Value] )
Queries a Digital Port for its state against your condition. Port is a Digital Port (between d0 and d20) Condition is either =, Value is either True or False If true, the following command (next line) is executed If false, the following command (next line) is skipped Example: If (Digital(D0) = false)
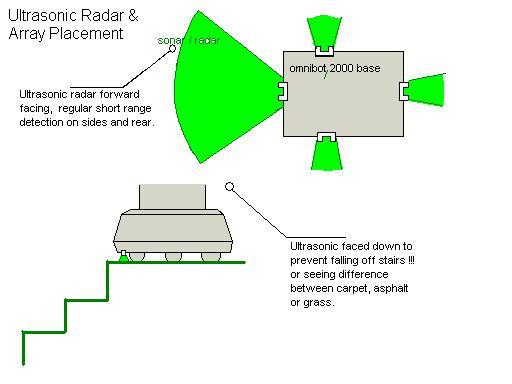
Specs for the ultrasonic sensor: HCSR04 range finder
power supply :5V DC quiescent current : <2mA effectual angle: <15 ranging distance : 2cm - 500 cm resolution : 0.3 cm
Resolution is how accurate the sensor is , 2cm is min distance which is less than a inch. The omnibot is about 2 inches maybe more off the ground so it seems like this will work. Basically calibrate it for 2.5 inches (or whatever the height is in cm) and if it sees a farther distance it stops , backs up a couple inches and turns. How does this sound , one on the front one on the back face directly down? Any ideas (besides remodeling the house lol) super appreciated. This is my first real robot. Thanks
@jstarne1 - I was going to try and use some of those Sharp analog IR distance sensors (or equivalent) aimed at an angle toward the floor for cliff avoidance. You'd use these with an ADC port on the EZ-B.
I think someone got some advice about using these sensors for stair avoidance. If you search the posts I'm sure you'll find it (I can't seem to at the moment... eyeroll).
EDIT: Found it!
Sharp IR - Big WALL-E post Starting at post #5. Hope this helps!
@jt ok cool so someone has done it , that's good. I believe ill put one on each end then facing down at a slight angle as to catch the bit before the wheels get to the edge.
https://synthiam.com/Community/Questions/224
Thanks , based off that it sounds like it works well.