
jstarne1
USA
Asked
— Edited
Is sonar a good option to avoid stairs and objects in all conditions? Is there a better option? Does having a couple sensors on same side of bot ( but not aimed in same direction) cause interference?

When I was asking a similar question a couple months ago, someone recommended just nailing a board high enough that the robot would get stuck to the edge of the top stair. Sometimes the easy solution is better than the elegant one. Depends on if you live alone or need to worry about tripping your wife/girlfriend/parents down the stairs in order to protect your robot
Alan
I would think just using a child gate would be better then nailing a board to the stairs, plus can remove it when your robot aint on the prowel.
I have roomates and dogs niether of those will work. The Omnibot has over 2 inch clearence so someone would break their neck lol
You have little bot's who follow lines.
Use the same sensor and draw a Thick black line on your stairs.
if the bot detect the Black line , he have to turn
or something like that
I have dark brown carpet..... And I rent my place. So that's not going to work
An on board metal detector on underside of robot & place a light metal plate under carpet ?
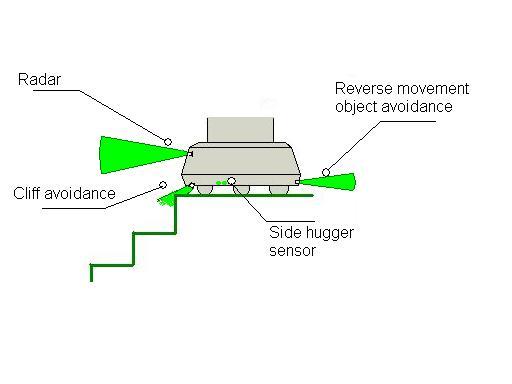
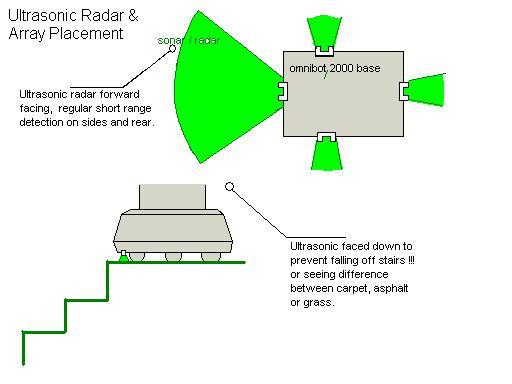
I appreciate the ideas but can we focus on what we can do to the robot to avoid stairs instead of modifying my house which is not mine so that's a no go. Is the sonar sensor good enough to point at floor and get a solid reading from like 3 inches? If it can maybe I could just make up a "all stop" command or reverse whenever the sensor sees the floor isn't there anymore , the sensor would be pointed down at the floor right in front of the front edge of the Omnibots base.
jstarne1-
Just some ideas here. Just brain-storming...
First, how does the Roomba's keep from going down stairs? If I remember right, don't you place some reflectors or something across the stair drop-off that it can sense?
Also, what about having a flexible wire drag along the ground encased by a spring. The wire and spring would flex slightly as it drug along carpet, hardwood floors, etc. This would cause the wire and spring to "connect" constantly and you could track this with the ez-b as a "full-on" state. When the edge of the bot started to go off the stairs, the wire and spring would "straighten out", causing the contact to be broken, giving the ez-b a "full off" state. You could then program the ez-b to tell the bot to back up and turn if the full-off state is envoked.
I've attached a couple of renders I whipped up that hopefully describes with pictures what I was trying to explain.
The 1st picture shows a robot chassis. Notice the spring at the front with the wire inside of it. As the robot moves around, the spring allows for adjustment as it travels over different terrains such as carpet, hardwood, etc.
This second image is a close-up of the spring and wire. Notice how the wire is in contact with the srpring.
The third image shows the robot at the edge of a stair and the spring is no longer in contact with the ground and straightens out along with the wire. In fact, instead of a wire, you could use two different sized springs so they always want to straighten out.
Just an idea...
Brad