Asked
— Edited
Sparkfun Hbridge
This video demonstrates how to wire the SparkFun HBridge to the EZ-B



 Inverse Kinematic Arm
— Control robot arms with inverse and forward kinematics, converting X/Y/Z positions into joint motion and reporting end-effector location.
Try it →
Inverse Kinematic Arm
— Control robot arms with inverse and forward kinematics, converting X/Y/Z positions into joint motion and reporting end-effector location.
Try it →

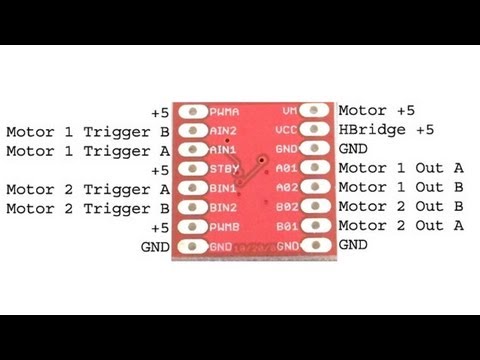
[feature] You will need 4 servo Cables
VM: Connect this directly to the Positive terminal of your battery
Servo Cable 1 AIN1: White VCC: Red (+5) GND: Black (gnd)
Servo Cable 2 AIN2: White PWMA: Red (+5) GND: Black (gnd)
Servo Cable 3 BIN1: White STBY: Red (+5) GND: Black (gnd)
Servo Cable 4 BIN2: White PWMB: Red (+5) *You do not neet to connect the 4th servo wire GND to anything because there are only 3 gnds on the motor controller board. Just snip the wire. [/feature]
Easiest to connect PWM to +5. However, if you want to vary speed then connect the PWM to digital ports of the EZ-B. Then configure those ports to be used as Servos. The higher the servo, the more PWM will be sent which results in faster speed. Slow speed, lower servo.
There ya go! You're golden
Err I'm sure I posted a question on monitoring motor stall currents with an ADC port??
Its gone and the answer
Yeah, server crash
Connect one of the ADC channels to the GND closest to the HBridge. When the adc reaches around 2 or 3 points, then a stall has occured
Hi DJ thanks
Shame about your HD stress
Hi every one, Is it optional to connect the PWM pins to +5/ digital ports or would the driver fai lto work if they stay disconnected? Nick
If the PWM port is connected to constant +5, then it will be full speed. If it is connected to a digital port, then you may turn it on and off -OR- you may control the speed by setting that port as a Servo. The higher the servo, the faster the motor.
DJ, Here's the wiring schematic I gleemed from your video, can you confirm it is correct?
Breakout board has 4, 3 conductor connectors
Breakout Connector Color Code notes
PWMA connects to PWMB on breakout AIN2 #1 white Hbridge + 5v #1 red GND #1 Black
AIN1 #2 white VM #2 red GND #2 Black
BIN1 #3 white STBY #3 red GND #3 Black
BIN2 #4 white PWMB #4 red GND #4 Black
I guess from dialog above that this connection is for constant speed, how would it change for variable speed?
The post under the video, i wrote this..
And if you compare that against this image:
And what you wrote is perfect So you got it sir! Now only notice that the Motor +5 should probably come from your battery directly. The Motor +5 is labelled VM. If you power the motor off the EZ-B, it may brown-out (depends on the load).
So you got it sir! Now only notice that the Motor +5 should probably come from your battery directly. The Motor +5 is labelled VM. If you power the motor off the EZ-B, it may brown-out (depends on the load).
How many volts is your battery? How many volts does the motor take? Depends on your application if you can power the motor directly from your battery. Most cases you can. I always do because my batteries are either 6v or 7.4v
[feature] You will need 4 servo Cables
VM: Connect this directly to the Positive terminal of your battery
Servo Cable 1 AIN1: White VCC: Red (+5) GND: Black (gnd)
Servo Cable 2 AIN2: White PWMA: Red (+5) GND: Black (gnd)
Servo Cable 3 BIN1: White STBY: Red (+5) GND: Black (gnd)
Servo Cable 4 BIN2: White PWMB: Red (+5) *You do not neet to connect the 4th servo wire GND to anything because there are only 3 gnds on the motor controller board. Just snip the wire. [/feature]