steve.neal
Australia
Asked
— Edited
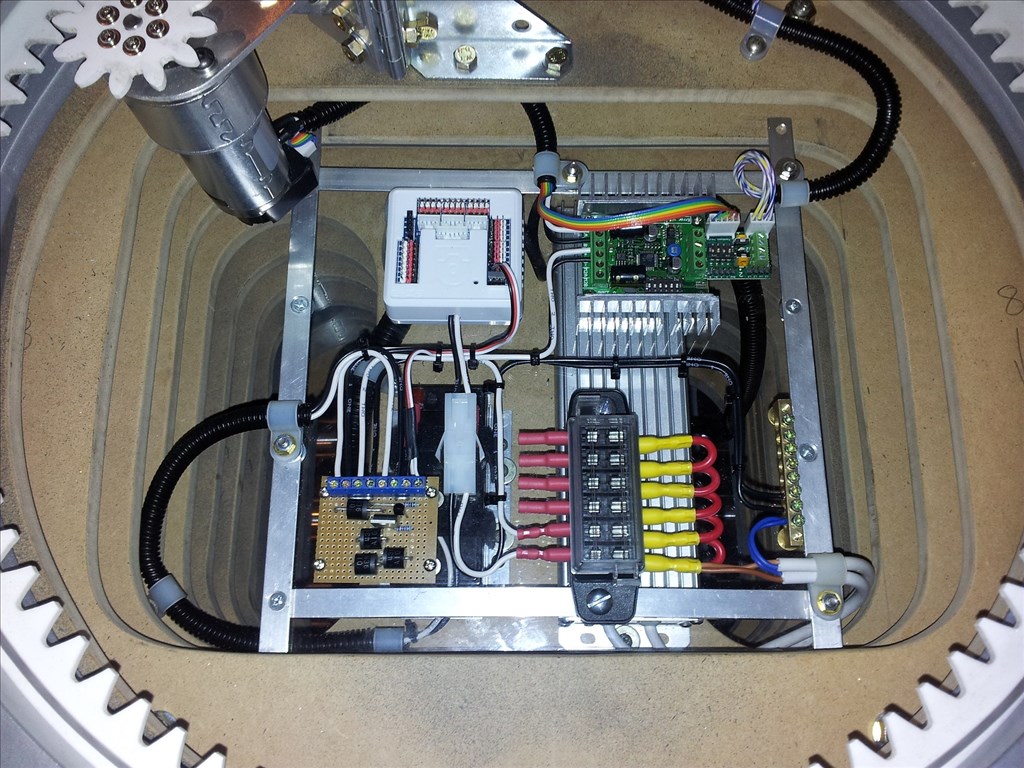
I cant seem to get my sabertooth/kangaroo to do an autotune. The moment I apply power to the sabertooth the motor starts running at about half speed and wont stop till I disconnect power. I am using a REX motor with encoder, limit switches, a 12 volt power supply and a battery to dump the regen power into. I have the sabertooth dip switches set to 1 on, 2 off, 3 on, 4 off, 5 on, 6 on. I have the kangaroo dip switches set all four on I just cant seem to work out what I'm doing wrong. Here is a pic of my set up.

Nice Steve. Very well done. Seems like your becoming a Roo expert. I'm so glad this is working out so well in your build. If I hadn't put so much work and expense into my forked servo lifter I'd rip it out and refit with your setup. It sounds like it's a smooth, quiet, quick and strong device.
You mentioned you were able to use the pot on the Roo to fine tune the speed. I was under the impression that that pot only worked in Mixed mode where the outputs are mixed together for differential drive mobile robots. confused
Sorry Dave , I have probably spoken too soon about the pot on the roo. I haven't tried it yet on the linear actuator roo, I just assumed it would work in independent mode blush My Bad! I didn't even think about that. I'm sure you are right. What you said makes complete sense.
It did however seem to have an effect on the ramping of the waist rotation motor which is in independent mode. It seemed to alter the speed of the ramping without going back and forward into the DEScribe software. You still needed to get it close to what you want in the software but it seemed to just tweak it a bit. I found setting the ramping speed to about 3/4 of the full speed gave a nice soft start and stop without taking to long to get up to speed.
By the way I forgot to say this earlier, Good luck with your arm slide auto tune. I hope it works as expected without too many headaches. I cant wait to see them in action
Steve
That's very interesting about the pot affecting the ramping speed. The ramping (or acceleration as DE calls it) is a Bata feature and completely undocumented. I have a feeling you, me and the programer at DE are the only one's to have this version. I haven't seen any updates to the full public release version since he sent me this beta version. I think he sent it to me because he got tired of me nagging him for a reamping feature. I'm cool with that. As my Dad always told me; "The squeaky wheel gets the grease".
I'm cool with that. As my Dad always told me; "The squeaky wheel gets the grease".
Anyway, after I get these arms mounted on my CSS I'll have to redo the auto tune on my waist motor and your setting and pot info will be great to know. Thanks a ton!
It's so very nice to have someone else working with the Kangaroo X2 and able and willing to play and tweak settings. There is so little support for this little gem of a controller. Although the support at DE is knowledgeable and friendly, it's a bit slow. I think it's a small company like EZ Robot and only have a few people working the various job descriptions. I suggested that they start a community forum so users could help each other like here on EX Robot but that went no where. It would probably be a resource issue for them and hard to monitor. Still, there is hardly any way to get help other then dont objectsupport email system and very little on the internet where people who use the Kangaroo X2 have documented or talked about issues, fixes or tweaks. Tony (Toymaker here on this forum) did some visionary type work with the Kangaroo X2 using mixed mode. He shared his scripting with us on the forum but his skill and logic in scripting so so far ahead of anything I could hope to understand at this point that most of it went over my head. He even adjusted it to work for me in Independent mode and although It did respond for me, again, the script was so ahead of my skill set I couldn't make it work for my needs. blush I feel bad as Tony spent a lot of time trying to help me.
I'm not going to "Hijack" your thread here. Dont want the forum police getting upset. But if you want a peek at where I'm at as of last night with mounting my B9 arms onto my CSS of my B9 Robot go over to my Project Page. Cant wait to get it all hooked up to the Sabertooth/Roo/EZB and see this bad boy suck in and out and wiggle around like a Night Crawler on a hot summer night after a heavy rain.
Link to my latest effort on my B9 Robot
Cheer's!