
fredebec
Hi,
I have finally found a Roomba 620 I wish to use as a robot base. Everything works great, thanks to @RichardR examples and some very interesting threads. Now I try to fully understand UART functions and the Roomba Open Interface, and sometimes it is a bit confusing... So, at this point I need some expert enlightenments.
Here is an example I don't understand:
Richard R made a script for object avoidance and it works great :
Quote:
:top $drive=1 uartinit(0, 2, 57600) #initiate UART port 2 (pins 18 Tx and Pin 19 Rx) sleep(20) uartWrite(0, 2,128,132) #Init iRobot create and place in full mode sleep(20) uartWrite(0,2,137,0,125,128,0) #forward slow$x=0 REPEATUNTIL($x>0)
uartWrite(0,2,142,7) #Roomba Bump and wheel drop sensor
IF (UARTAvailable(0,2)>0) $x=UARTRead(0,2,1) $x=GetByte($x)
ENDIF print($x)
IF ($x=2) # left bumper hit uartWrite(0,2,137,255,155,128,0) # back up sleep(1000) uartWrite(0,2,137,0,100,255,255) #turn right sleep(2000) ELSEIF ($x=1) # right bumper hit uartWrite(0,2,137,255,155,128,0) # back up sleep(1000) uartWrite(0,2,137,0,100,0,1) #turn left sleep(2000) ELSEIF ($x>2) # centre bump or wheel drop uartWrite(0,2,137,255,155,128,0) # back up sleep(1000) uartWrite(0,2,137,0,100,0,1,157,0,180,137,0,0,0,0) #turn around 180deg sleep(2000) ENDIF
sleep(20) ENDREPEATUNTIL goto(top)
But I don't understand the GetByte values: $x=2 correspond to "left bumper hit", $x=1 to "right bumper hit" and $x>2 to "centre bump or wheel drop"... but when I look at the OI documentation :
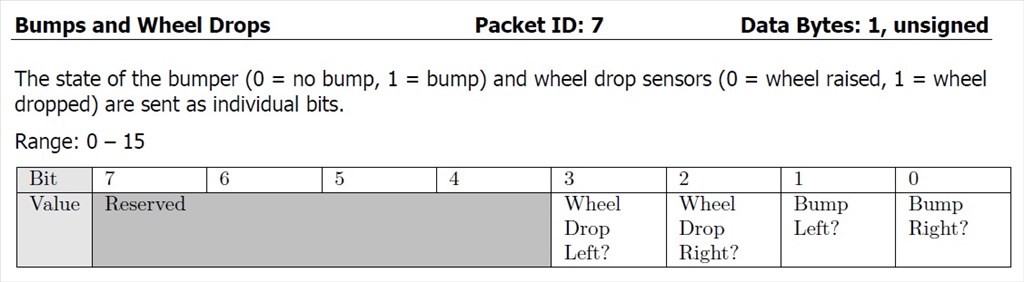
I don't see the fit with the bit values and I don't see how the Range could be 0-15 with only one byte...
Thanks for the help and sorry if it is a stupid question (I am afraid it will not be the last )
)

@DJ, Ok, I see why it is interesting to use GetBit(). But now, I don't understand where the $x=2 come from....
The function is GetBit(Value, Bit). Why the value is $x=2 in that case ?
Thank you all for your help.
@Richard, thank you for your scripts, it helps me a lot to have concrete examples.
@fredebec Here's another example for getting the roomba's battery voltage and charge state.... This example is using UART 0, however...
The value of $x=2 just means that if bit position two is set to a 1 then "Wheel drop right" should be happening.
@Robot Doc, now I think I am lost again
When you say "is set to 1", you mean "the state of the bumper/wheel drop is 1", with 0 ($x=1) = no bump/wheel raised and 1 ($x=2) = bump/wheel dropped. Am I correct ?
@Richard, thanks for the script. I will test it as soons as I can.
Each bit position represents the state of a single sensor. If the bit position is storing a 0 then the sensor is off. If the bit position is storing a 1 the the sensor is on.
I just used a $x to set a fake value to demonstrate the rest of the code. It's merely a place holder for the demo to run.