Asked
— Edited
Roomba 500 Locks Up Using Ezb4 With D0
Testing the Roomba 595 using the EZB4 connected to D0 does not work very well. Sometimes the selection boxes for turning on the side brush, brush motor or vacuum will not turn on the selected motor. Or the motor will run but cannot be toggled off. Other times the port seems to hang and then the Roomba will reset.
When using the UARTWrite commands with the Roomba connected to UART 0, all motor commands work correctly.
I suspect a signal level issue, possibly lower than 3.3vdc vs 5vdc Roomba ttl. when using the digital D0 port.
Would it be possible to change the EZ-B GUI Roomba control from using D0 to UART0 ?

Hey Doc have you tried using UART 1 (D5) or 2 (D18)? The V4 daIa sheet states the UART TTL signal level is 3.3v as well... i am going to test the v4 on my Create this morning and see how it goes.
So basic controls on the Create work from D0 as expected ... That would be basic driving etc....Since the Create isn't a vacuum I can't test the other controls like side brush, main brush etc...
Ok, so I was also able to send driving commands to my Create using UART 1... I was able to call "Cover and Dock" routine no problem... So I went a step further and used a modified version of DJ's UART example code to query the Create's battery temp... I chose it as it only requires a simple single byte return (in Deg C)... It was a no go, however... I couldn't get anything sent back from the Create... Below is my code...
For some reason the R2 model Roombas (includes Dirt Dog, and Create) seem to work without issue using the EZB4 in conjunction with the pre-defined controls that use the Digital port D0. However I tested using several of the R3 Roomba models, 510, 535, 560, and now a brand new 595 and they all exhibit the same results of not responding correctly to button selections using the "Roomba movement" choice.
R3s use 115600 baud, whereas the R2 use 57600, correct?
The R2 model Roombas use 57,600 baud and the R3 Roomba use 115,200 baud as the default start-up baud rate.
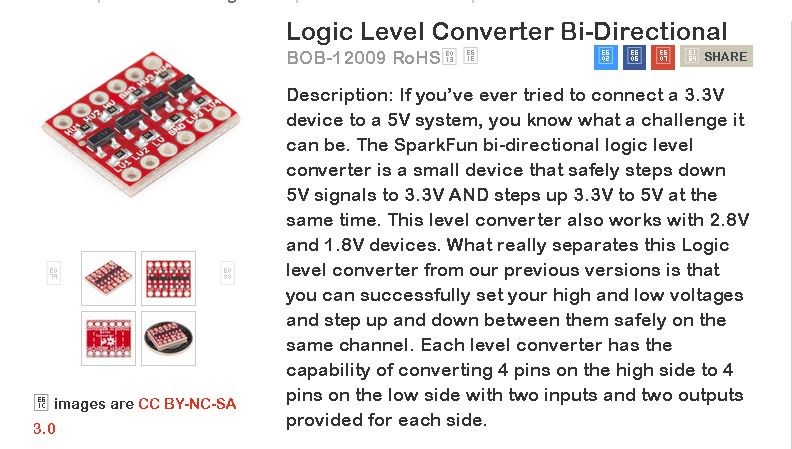
I may have found a solution to the possible difference in the serial signal voltage levels between the Digital port on the EZB4 and the TTL levels within the R3 Roomba. I've ordered a couple of these Logic Level Converters from Sparkfun.com and will do further testing when the hardware arrives.
That's awesome Doc, let us know how you get on...I am going to keep trying to figure out how to read packet data using the UART...