derrick
USA
Asked
— Edited
Robot Vacuum Programing Help?
hello all, for my very first robot im wanting to make it vacuum my livingroom by itself. my question is,whats the best way to do this thru ARC ? the hardware shouldnt be a problem im just wondering about the software aspect.im going to order my first ez robot kit this sunday,so thats all the hardware i will have at the moment besides some old handheld portable dustbusters im going to gut. is it better to make a motion script or are there any examples i can work from. any help guiding me in the right direction is appreciated,thanks
p.s im not afraid of alittle coding if it makes a better autonomous vacuum

Derrick Hello and welcome, you could start playing ping radar control, when you receive your kit ez-robot can use the ultrasonic sensor is supplied (ping), download the latest version of ARC (if you have not done yet ) to start practicing with the controls. Ping radar control is configurable, although, its trajectory is somewhat random. May want to write a script to make your custom paths, I personally have not seen any examples of scheduled cleaning path here in the forum, but always too late to create it.
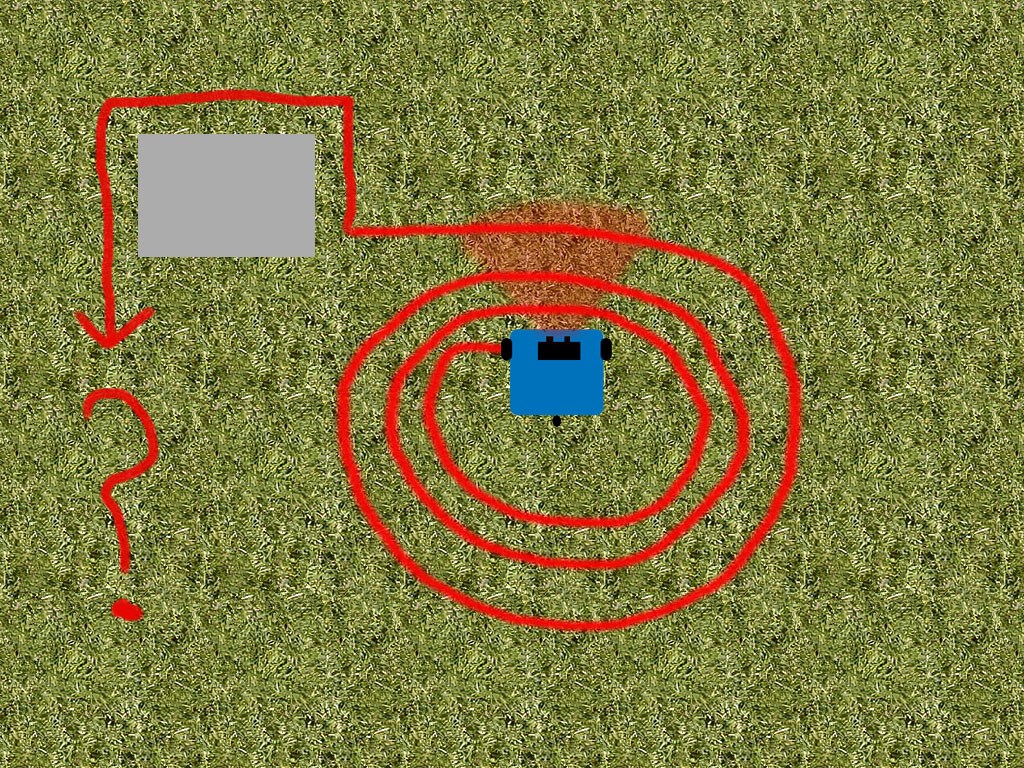
The drawing is an example of cleaning path and the video is the way you browse the robot control radar scan.
r2d2, thanks. i guess that is a good start. i just want it to be as efficient as possable.i have read a little about the roombas cleaning path. they use an ever increasing circular path. and when the vacuum comes across an obsticle it cleans around it. i guess if i use a script for the motion path, or possibly using the wheel servos pwm to controll one servos speedi can acheive a circular path. then use the ping radar with a script to seek an "out" when it detects an obsticle. thank you i guess ill have to wait untill i get the kit.
Be aware that the servos aren't that quick or powerful for moving a robot platform - take a look at the quick "testbot" video I posted up which uses 4 modified servos to drive it.
Scripting a cleaning path should be pretty straight forward. Using the Ping sensor would work or you could build a bump switch around it and go the way of the good ol' Whiskers vacuum cleaner.
Depending on costs, a compass module could be added for accurate turning. By turning by time the robot will not turn exactly 180 degrees or 90 degrees or whatever you want it to turn. Time based turning is inaccurate, but would probably be fine for a vacuum.
Ever increasing circles is one way to go. You could have multiple patterns. Ever increasing circles, edge following, random wall bounce... each pattern running for a set amount of time.
There are a lot of options for you. Vacuum movement and operation programs are something I've looked at writing a few scripts for in my tutorials to show how to use $date, $time etc. to automatically carry out specific cleaning tasks dependant on the day of the week, week of the year, month, etc. so any help or advice on that please feel free to ask and I'll gladly help.
Also don't forget the recorder control, although buggy when long recordings are made, could be useful for you.
well this is what I had in mind " see above". thank you rich, edge following and circles is what I think I am going to try first with the ping radar. I think adding custom scripts will be the easiest way to add functionality, and get it to do what I want....lol the vacuum parts are not that heavy its a very small handheld vacuum ( just going to test it out ). I guess it is dependent on the servos. at this point I am going to have to wait and see what they can handle. if they can take the weight....do I go the dc motor route? and I assume I need an h bridge to control them.
Yeah, DC motors need a hbridge. Personally I'm not satisfied with the modified servos for driving my testbot, they work but only just. Give it a try and if they are no good then go for motors.
Scripting isn't always the best option but I prefer it, although I find it soothing and just what I need to get lost in sometimes EZ-Script is very simple to use, if you think logically about how you want it to act then chances are the script will just fly out.
EZ-Script is very simple to use, if you think logically about how you want it to act then chances are the script will just fly out.