R2D2
Possible Alternative To Navigation
This is an idea I have for some time and I would like a little squeeze.
A navigation system for corridors but also for the house in general.
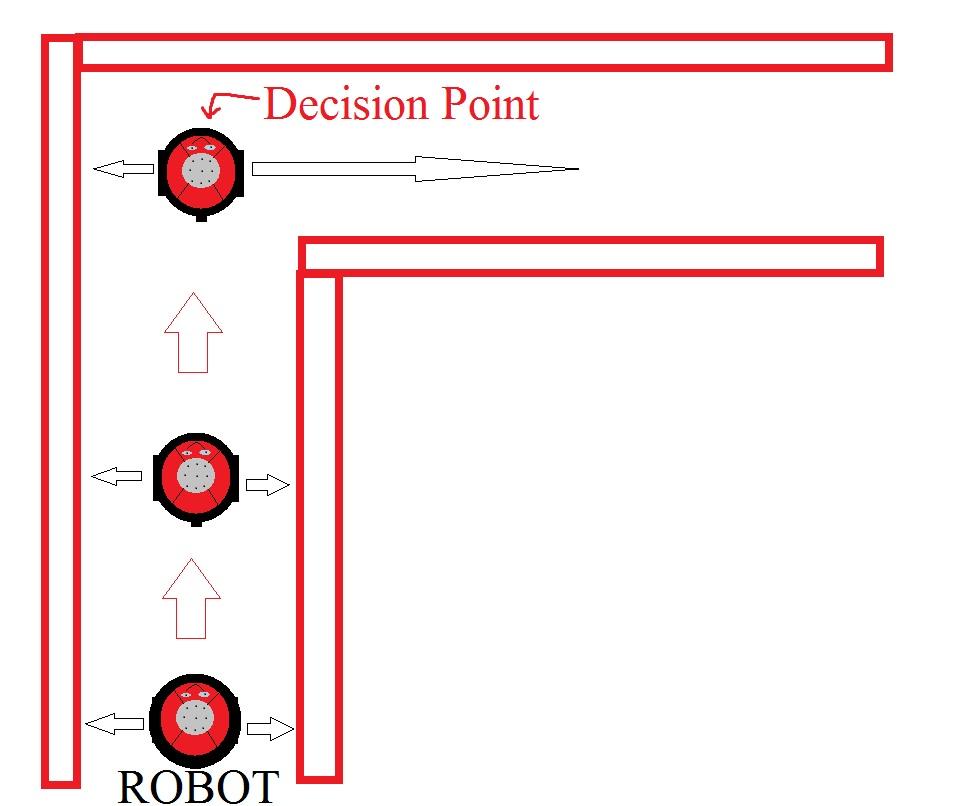
This is placing two ping sensors, one on the left and one on the right of the robot (on the sides) and take readings almost simultaneous.
Then make a script that allows measurements equate the two so that Correct the robot path and always flows through the center of the hall.
Let's say this is the beginning of the theory and that the Scale system is called ultrasonic, if this is handled by a script, and can be combined with other scripts, the way " Scale electronic" can be interrupted when the corridor forces you to turn the right for example, the sensor readings and not make a total of 30 inches (15 per side) for example, but 15 inch mark on the left and on the right 40, which sum 55 inches, very different 30 inches of aisle.
This would be a way for the robot to make a decision, locate the end of the hallway or even distinguish the different rooms running through their center and measuring the total distance side.
Data could also be used as light or room acoustics combined with ultrasound report distances to obtain a more reliable without being infallible report, I think it would be enough with a 93% chance of success.

I already snagged and ran with this idea and added two more side ultrasonics.
I made a script earlier to make the robot go backwards if it runs into something (or close to it.) next, it would go left if the object was on the right and Right if the object was on the left. and it would keep going forward if there were no objects ahead. I am close, but not quite where I need to be on it.
That was similar to yours I think. I made on a long time ago that worked well. But, this one has had me scratching my head.
That's great, I think everyone can benefit from this thread, but the idea itself is not positioning the sensors on the sides, but open a discussion on a theory of navigation, that is based on combining information from different sensors to create a more reliable accuracy rate. The other point is to create preprogrammed routines and we'll have to experiment and combine with other routines such as: does the robot if the hallway turns right: 1 - disables script centering corridors Scale 2 - activates a clockwise rotation of 90 3-Sets a time delay until sobrepasr the corner of the hallway and not confuse the centering Scale 4-activated vascular centering again All this should be combined with a sensor front ping course. You could also incorporate a centering control aisles with a lateral distance setting, for example 25% left and 75% right of total distance to travel on one side of the aisle, very useful if there are people walking around.
You could also go a step further. After it went forward for a while, you could let IT decide which direction it would go. Then, give it a random number and let it pick a direction. Let it have confidence levels any where from 0-15. Some people use as little as 0-3. Store the confidence level in a variable. If it runs into a wall , let the confidence level have a value equal to that variable -1. Then , if it goes straight without an object, let the Con. Level get a Plus 1 bump. By the time it goes all over the place it will KNOW where the walls are by the C-Levels. Then it can choose the direction that it has higher confidence in. That way, he is demonstrating a type of A.I.
:D
i am hopping to use a LIDAR for navigation ,if you look at the specs and look at the big robot companies that use on ,they use it for navigation,on the KINECT is not always a good for navigation found 2 bad items about it,first draws about 2 amps so 12 volt at 10 ah only 5 hours can be used,then need to add motors,servo's boards,sensors and need a very large batter to handle it most current used on KINECT is from the PELTER element,that keeps the laser cool
second is you cant navigate and use its webcam at the same time,so another web cam is needed so using a LIDAR IT DRAWS under 400ma ,usb input, and very high accuracy,lost one with high accuracy is NEATO XV-11 there are many hacks,info and window drivers on the web also very small and light
I like the idea of IA MovieMaker, it is clear that learning from mistakes is proving its intelligence, and robotmaker: sure there are sophisticated systems that precise credit Blast hit make life easier (or not), but if something at my wits sharpened in recent years is to have limited resources, which leads me to use what I have and share the experience with the community, furthering this issue, and if it can be combined to create some routines up to cloud and others to use.
other concept thats used a lot is using fudicals are used alot in navigation,fudicalas are photos or anything on the wall or markers msaved in a data base and using sonar and ir ,plus a web cam can map out a room for naigation most the field i know everything about is sensors ,almost have every sensor made at home
and at work i design testers for checking certain sensors we use in the instruments the company makes,like level detectors,sound sensors,depth sensors ,wire tracing sensors ,ultrasonic sensors for A/C SLIGHT GLASS,GAS SENSORS and still longer list on using sonars and IR sensor a few ideas to get a good accurate readings
on ultrasonic you need them near the top of the robot or above or below sofas or sound absorbing material also never face a ultrasonic down unless you are not near carpets on IR need to be placed near the bottom of a robot to keep away from light or shinny objects on using IR for cliff detectors point at a angle so the robot will stop in time,when the brake is used on a motor the robot will go foward a few inches,so need to set the angle out very far out in front another item on using IR if looking for distance to a corner of the wall set the IR SENSOR VERTICAL all of these ideas will help in getting good navigation
Robotmaker,
To everyone else out there trying navigation ideas in this post I wish you well - Luck be with you - and this is not to say areas covered thus far do not have merit and the ability to work.
What I'm looking for is a map process where I can draw a map, give the robot a plot of where obstacles are likely to be and an instruction to tell the robot - you start here on the map and get to there on the map - use your ping to avoid any unknown obstacles along the way.,,it's that simple ..it's been done very successfully using MS VB and there is no reason it can't be applied to the EZ_B.
I'm presently trying to work it out - but working in VB 6 is like asking you Robotmaker to find life on Mars...I'm hopeless with code (thus my attraction to ARC) so if you can help along this line that would be good. I'm not interested in fudicals, compass direction, lazer beams, IR beacons, light following detectors, line following detectors, satellite navigation etc
How hard can it be ! Navigation Map
Navigation Map
Quote "Once the robot has provided sufficient data about its surroundings, the user can use this map to send the robot to any area of the environment and the robot will avoid all obstacles on its course. This is done by clicking on the goal position of the robot with the right mouse button (draws the green dot in Figure 4) and pressing the "Determine Path" button in the VB interface."