
Dunning-Kruger
Ping Dave, Need Help On The Kangaroo X2 Setup.
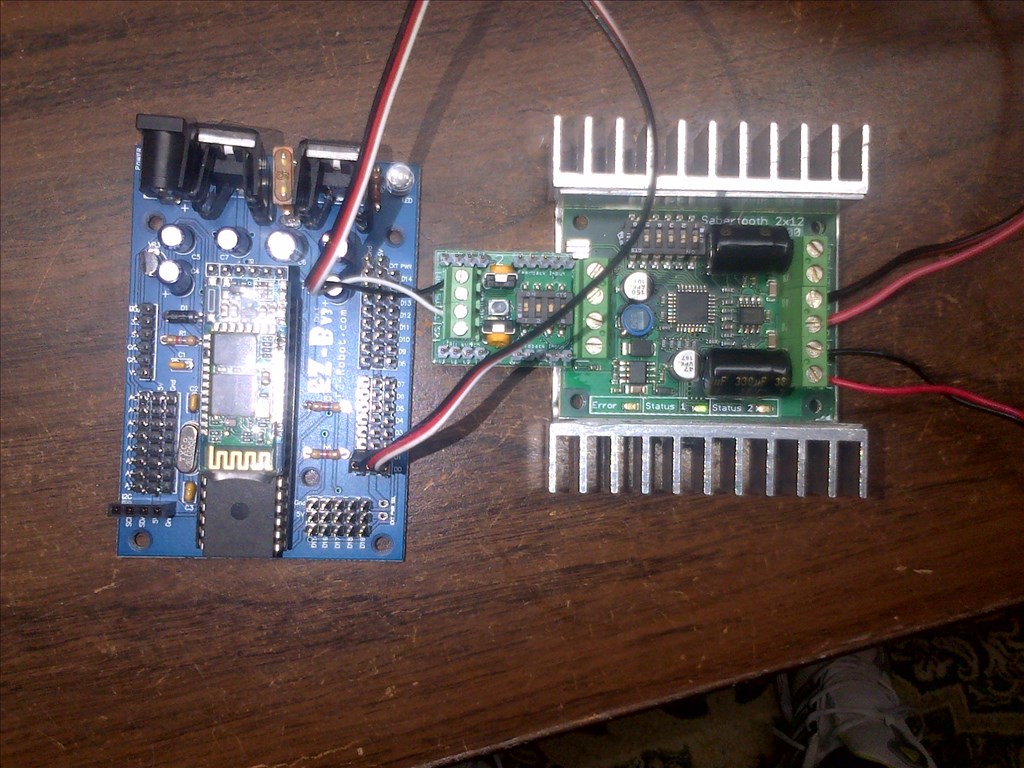
So I got my Kangaroo x2 board and I am trying to test it using basic serial command... I have been using this sample code (below)... I think I have the dip switches right (maybe not), but all the motor does is spin at about half speed... and nothing sent from the EZb does anything... See the picture to see if I have everything hooked up right... not sure what I am doing wrong... Can't even stop the motor from spinning... As soon as I plug in the Kangaroo and add power, the motors begin to move? I haven't read the entire Kangaroo manual yet, so maybe I am missing something... The sabertooth 2 x 12 is ver 1 that I bought 2 years ago... Maybe I need a newer one?
Dip switchs on the Kangaroo is 1=on the rest off... The Sabertooth has 1,3,5,6 on and 2,4 off
SendSerial(D0, 9600, "D,p2450 s800", 0x0d, 0x0a) SendSerial(D0, 9600, "D,p3675 s800", 0x0d, 0x0a) SendSerial(D0, 9600, "D,p1225 s800", 0x0d, 0x0a)
D0=EZ Robot Port 9600=Baud D=both Motor Channel Pxxxx=Position sxxx=Speed 0x0d=Return Key * 0x0a=New Line*

Looks like people have the same problems with these things over and over. I am surprised that as long as they have been out there is not more about them
Ya, I had the same thought. Very little coverage and conversation out there in the wild. I had a chat with the owner of DE once and suggested a support forum where users could help each other like we do here on the EZ Forum. He was telling me how he handled most of the CS stuff himself with the help of only a couple other people. He just kinda brushed me off in a nice way. eyeroll
Keep up the work on getting your Roo to work. It's a cool device and well worth figuring out.