
CharlieDude
USA
Asked
— Edited
Phone App Question Or Valuable Lesson?
I just got JD a few days ago and have used my PC for building and fine tuning JD and all has gone good until last night. When I tried using the phone app with JD last night for the 1st time and when JD connected, his right knee servo went in the backward position as far as it could go, froze, and burned out the motor almost instantly. I'm assuming this happened because I hadn't loaded my servo profile from the cloud before I connected to JD? I've since then swapped out the servo that burned out and have very carefully connected JD to the phone app today making sure my cloud profile is loaded and so far everything seems to be working perfectly.
Am I missing something?

If it is that far out of calibration, I would say you need to do a physical calibration before doing the servo profile. A servo profile is for adjusting at most a couple of degrees. Physical calibration should be done first.
Most of the servos come from the factory correctly calibrated or close to it, but from your description is seems to me like the burned out one may have had the bracket mounted way off.
Alan
Adding to what alan said... when you created a servo profile on the PC, how many degrees did you have to adjust?
In an answer to both of you, the servo wasn't out of calibration. As far as the amount of calibration that I had to do to most of the servos when I built JD was generally +/- 0 to 4 degrees. The ankle servos were the only two servos that required a larger adjustment which required a 7-9 adjustment to make them sit flat.
I had just done a little song and dance to show him off to my son with JD connected to my PC and everything was fine. JD did what he was supposed to do without any issues. That's when I decided to try out the phone app, which I also previously watched the tutorial for.
This morning I swapped out the servo and rechecked calibration via the PC, then opened the phone app, loaded the cloud calibration save, connected JD with my phone and all is well.
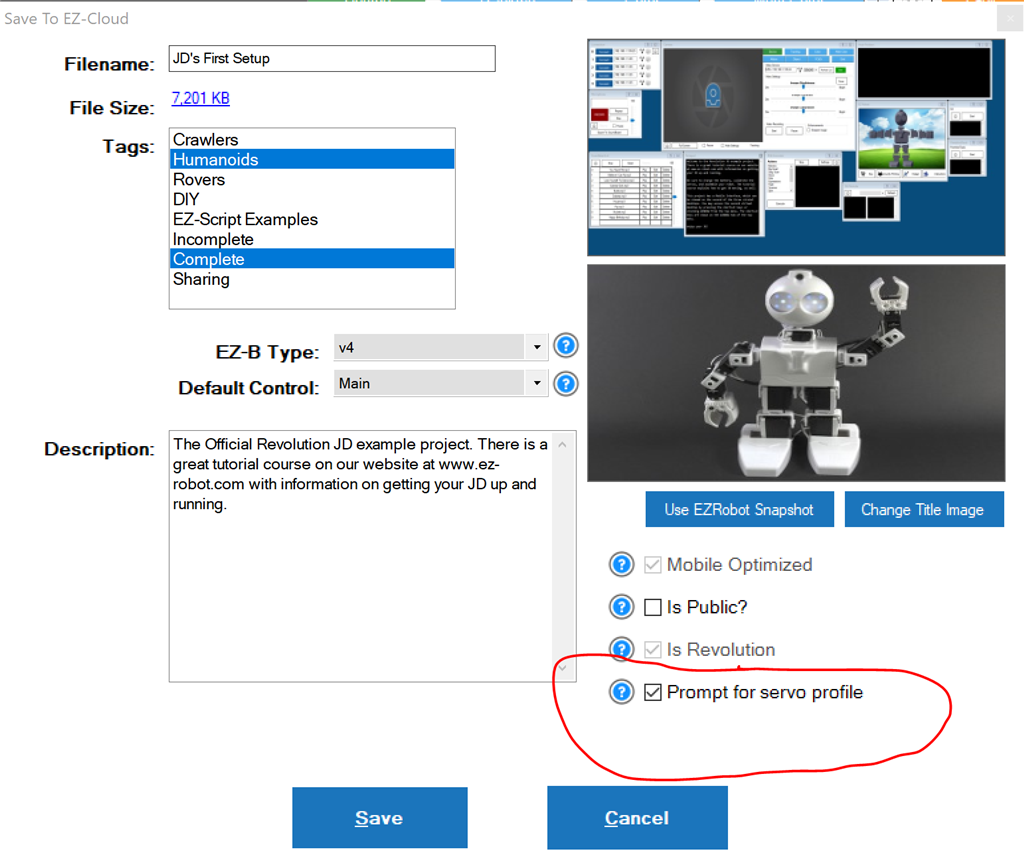
The only thing that I can think of is that I didn't load the cloud profile before I connected JD to the phone. Something I noticed that is different between the app and the PC is that the app doesn't prompt you to load a servo profile like the PC does when you load JD's files.
Gremlins?
The app does prompt for servo profile when the connection is established - if you selected it to when saving to the ez-cloud. You're using a custom app, which isn't the default app. When you saved it, the option to load servo profile wasn't checked. That wouldn't cause a problem - because without the servo profile, the fine tune values would be zero (0).
*Edit: i looked at your app, and the servo profile option is indeed checked. So it would prompt for a servo profile when the connection is established with the robot, as seen in the tutorial. Hover over the blue question marks to read what an option does throughout the software
There's no way the software did that - I'm leaning toward a defective servo.
Even in software, if you set the position to 1 or 180, that's fine because the servo can move that far. It's impossible in software to configure a servo to move further than the range.
I'm guessing the servo was defective and it failed coincidentally during the mobile app connection.
Have fun!
One last question - do the servos on your JD read HDD or HD?
The servos are HDD.
I'm leaning towards it being a defective servo, but I've never seen a servo snap back to its extreme like this one did and sit there and chatter. By the time I reached down to pick up JD it started smoking. I knew it was all over!
I ordered three more EZ-Robot Lever HDD Servo-motors from Micro Mark to have some spares just in case this happens again. I know I've got to swap things around, but that's no big deal. I swapped out JD's ankle servo with his knee servo and left the burned out one disconnected to get him standing again. He actually does pretty good with a bad foot.
About my phone. I have two installed robot apps on my phone, one is JD, and the other is JD's First Setup. I wouldn't think that the JD app would create a problem since it has the default servo settings.
Contact Us and reference this thread. We will get you sorted
Contact sent through warranty issue.
Thank you!