
ezrobot3
Singapore
Asked
— Edited
Sorry but may i know why my auto positions aren't working in the mobile interface but only the camera is working? i've checked the ports and are connected properly.

Okay, if you calibrated the servos then his arms are not connected correctly. They should be facing DOWN along his SIDE when initialized
The sound of JD humming is normal - humanoid robots are loud because they use SERVOS to hold their position.
Have you completed the tutorial on Connecting To JD?
Yes i have completed it but both of its hand seem to have some problem like the waving action it will assume the position like the above pic and if i make it walk, it will just fall down on its second or third step,
when i start the connection the arms are facing down as well
It appears the servos on the arms are not calibrated correctly. When I'm at the office tomorrow I will send you a photo of the position his arms should be in when calibrated correctly.
There is another Lesson that I have to finish tomorrow on how to calibrate his ankles using the software Fine Tune feature. That will be what you will need to help
alright thanks so much!
My pleasure Now that the robots are shipping, I am spending all of my time creating tutorials and based on the experiences of community members like yourself.
Now that the robots are shipping, I am spending all of my time creating tutorials and based on the experiences of community members like yourself.
If you complete a Lesson, there is a button at the bottom where you can mark it as Completed. Completed lessons show up in your profile, which help others (including myself) know what lessons you have learned.
This position is after calibration when everything is set to 90 degrees correct?
but when i click on connect, the position turned to this
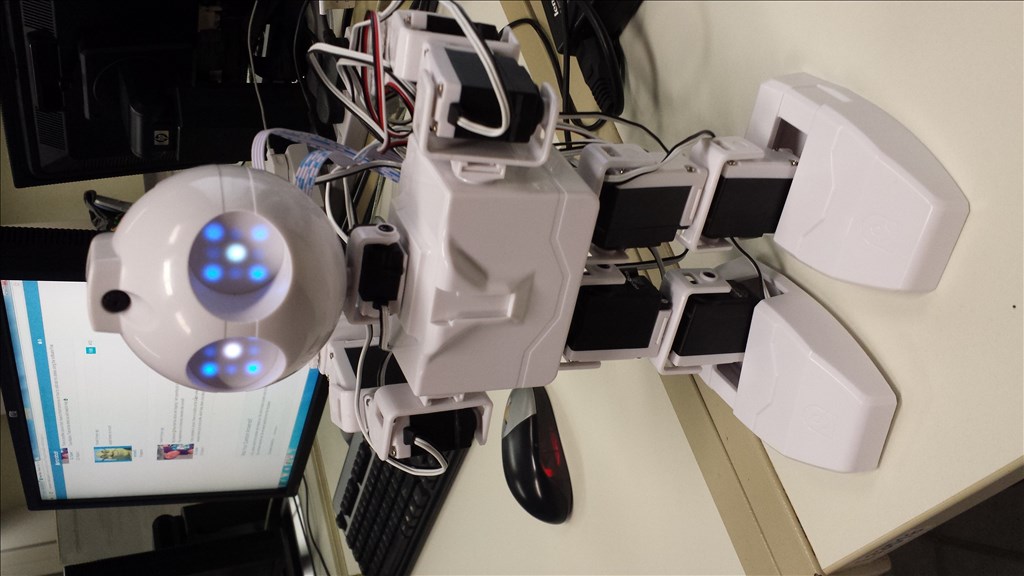
both of its hands will go 90 degrees backwardsFYI i am using ur jd example
i tried using the fine tune but im not sure how it works.
NVM its ok thanks for the help i sort of solved it alr.