
Andy Roid
USA
Asked
— Edited
Navigation Indoors
Many members have developed many types of navigation systems over the past few years. I would like to reach out to find what has worked out best. I am sure there are many types of designs. I would like to avoid complex third party add-ons, unless they are required.
My personal designs have not met my goals. I want to maybe get a new perspective based on other member's designs and ideas. I have made a similar request in the past, but with new sensors and meathods available, I wanted to see if there are new developments.
Can anyone Help?

Look at this thread... You already asked this question before... Indoor Navigation System
Thanks Richard, for the reminder.
I was wondering about possible new systems or ways to navigate. Dj had begun development on a system a couple of years ago which never progressed further. There was a few companies working on systems also. I know many members built systems too. I am looking for maybe a new way to go.
I am working on an idea using modulated ir signals to determine specific way points. It is based on the same idea as using gliphs. I am not sure if this is the right way to go.
Using a lidar and mapping is another way. Do I put the lidar on the robot or in the room?
I just wanted to know what is working for people, now. What is working for you currently?
My goal this fall is to begin to modify or build a new unit which will navigate through 3 rooms.
I'm looking for new or currently working ideas which are or will be dependable.
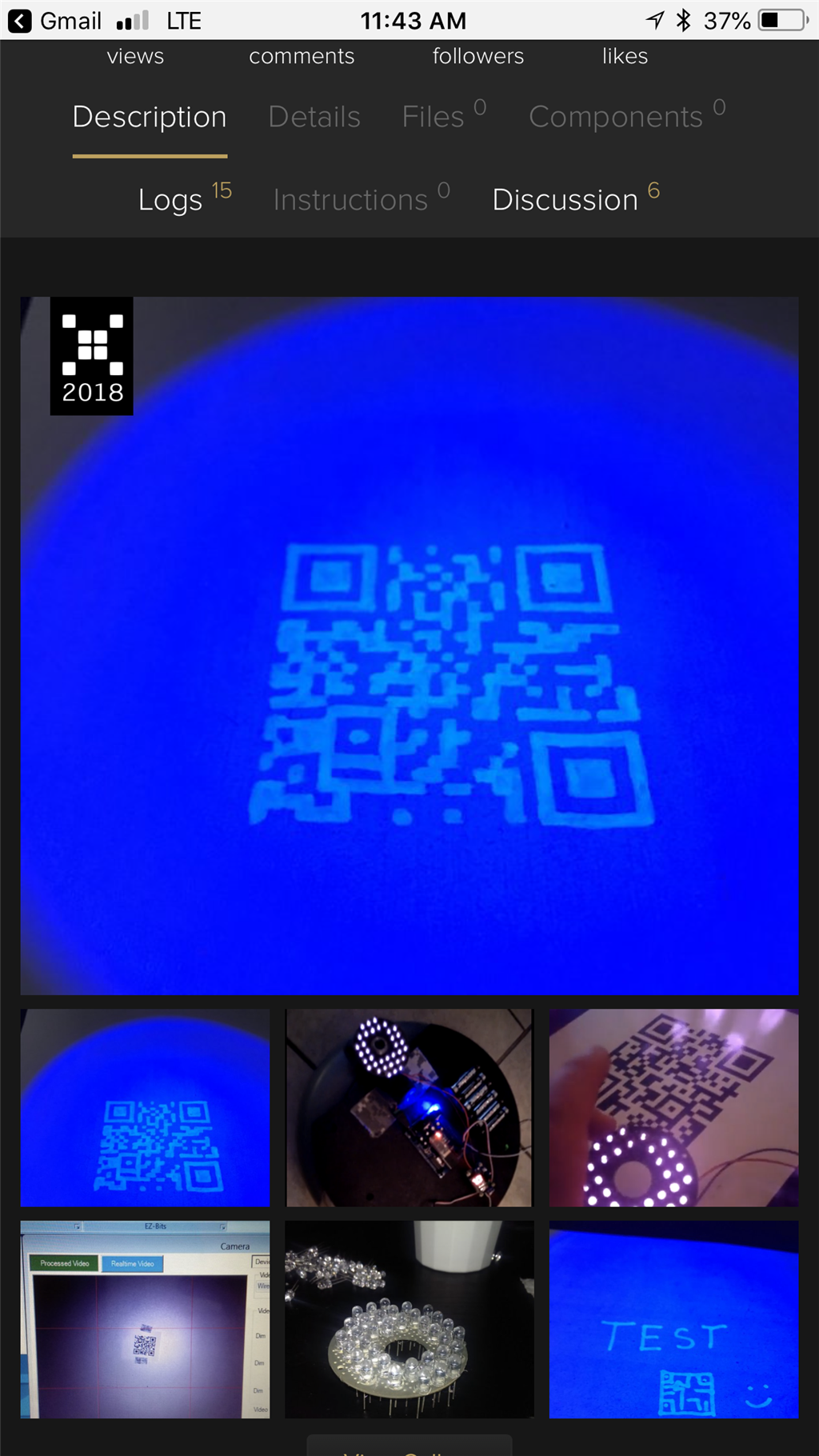
Hey , I don’t know if you saw it, but I started working on a project that was shelved until recently involving qr code / glyph recognition for navigating. Of course have tags all over the place may look horrible ,but I found ways to print clear tags with IR or UV invisible ink that the robot can read to determine position or all kind of other cue codes as well! If your interested I’ll tell you more. I need to copy over some stuff onto the original ez robot thread but I have been more active on hackaday because I’m getting money that way through the challenges at the moment.
https://hackaday.io/project/135292-ir-uv-invisible-qr-code-navigation-robotics
Hi Jay,
I wasn't aware you went further with the project. I would like to take a look at your information if you are willing to post it, or if I should just go to GitHub? I have also been wondering if there is anything new in navigation systems? I know this is a major step for a home robot that can really do something. Facial recognition, speech recognition, ai conversation and other functional programs get a home robot close to real. Navigation is the last piece. By the way, how is you security robot working? And did you ever finish the mower? I am trying to get a project ready for the New England winter. The home navigation would be a nice project. My final goal is to build a full robot using Antonn's systems with navigation. (Olivia) Thanks for the reply. Ron
Yes I did get the mower going, no it is not autonomous because outdoors is a different monster than indoors, I would like to make a smaller mower for autonomous use.
I posted the link to the ongoing progress, I will make a effort to start updating the thread here ,but there has been a bit of progress since then.
Basically to do my method you will need to print qr codes with special ink and use them like stickers to identify areas and points of navigation in your home, even on the ceiling works.
Sounds good! I will take a look at the listed stuff. I assume I can start playing by using normal printed glyphs.
Sure can , do development with regular printed codes and switch to invisible when you like how it is working. I may actually sell printed invisible stickers since the investment for a printer dedicated for Robot navigation tags is prohibitive for some builders
Sounds good!