
Asked
— Edited

Motorboard
hi
i found a motorboard for few dollar.but its little diff then what dj is using. my question would be,can i use the H bridge here to.. the H bridge is for controlling the speed off the motors wright?
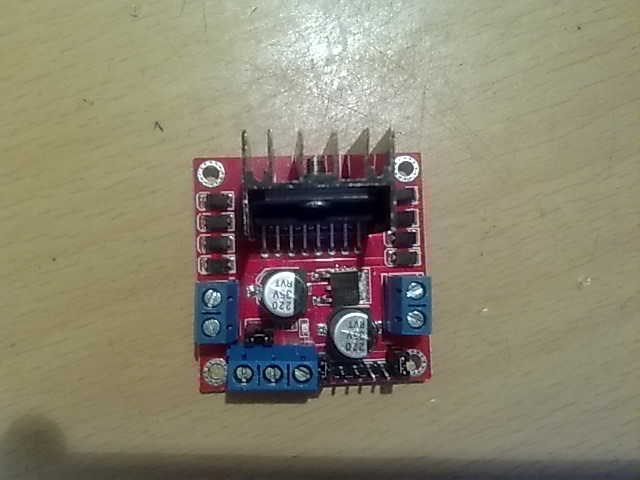

Do you have a datasheet?
It looks like it uses the L298n so should be very similar in operation.
I can't see any labels on the connections on the image, are they labelled? If so, what are they labelled as?
Pure guess work based on the L298n, I'd say that; The 2 connections on the left are Motor 1 +/- The 2 connections on the right are Motor 2 +- The 3 connections on the bottom are VCC, Ground & 5V (however the order is unknown without labels, datasheet or tracing the tracks). The pin header are your inputs/enables (in1, in2, in3, in4, ena, enb)
If that's the case then follow the L298n tutorial I wrote and adjust it to suit your board.
the 3pin on the bottem are left 12 volt middle vcc right 5 volts the 2 pin are out1 and out 2 aswel for left and right motor it says l298n cz018208 vw cz .mar the only diff is the 4 pin heather is only one row,on the side are two jumpers
The jumpers connect Ena to 5v and Enb to 5v. Remove the jumpers, connect a digital port to ena, connect a different digital port to enb and use PWM on those two ports to control speed. Make sure you don't connect the +5v pin from the ena/enb to the EZ-B though.
ah the double wire that goes from motorboard to the red jack,that its bin chowwing in the video.
To be honest, and I may be biased, but my tutorial covers it all in great detail and may give more of a clue than DJ's video.
all is okay rich.i just dont understand englich programming language not so good. so thats why all the question.i will look your tutorial.thanks