ptp
USA
Asked
— Edited
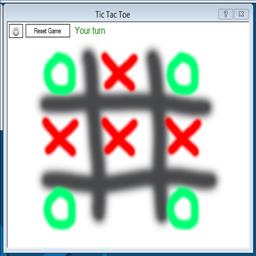
Jd Humanoid Robot Controlled By Kinect
This is a video of JD being controlled by a Kinect, I still need to to fix some discrepancies.
Only head, arms and grippers are being controlled.
I have the legs ready but i need to figure out away to secure JD when he loses the equilibrium, it's very difficult to keep him safe if you make a wrong move.
fishing lines ? more ideas ?

Good work ptp Is there way to start and stop this plugin in a script?
Great, I tried it, but I was not able to write a Plugin.
The DepthSensor plugin works fine, but in some situation the plugin stops working. I had to exit ARC and start again or delete the plugin from the Project and add it again to continue working.
I tried ist again and again and I think, when I'm very closed to the Sensor ( 50cm? ) and then I go to the right out of the sensor window it will be frozen.
Sorry for my bad english, I hope you understand what I mean.
Bye Hansi
Beautiful application. Great. One question, how can I lower the 180 dergees. If I try the prompt say the servo max position cannot be less then servo main position.
Thanks Peter
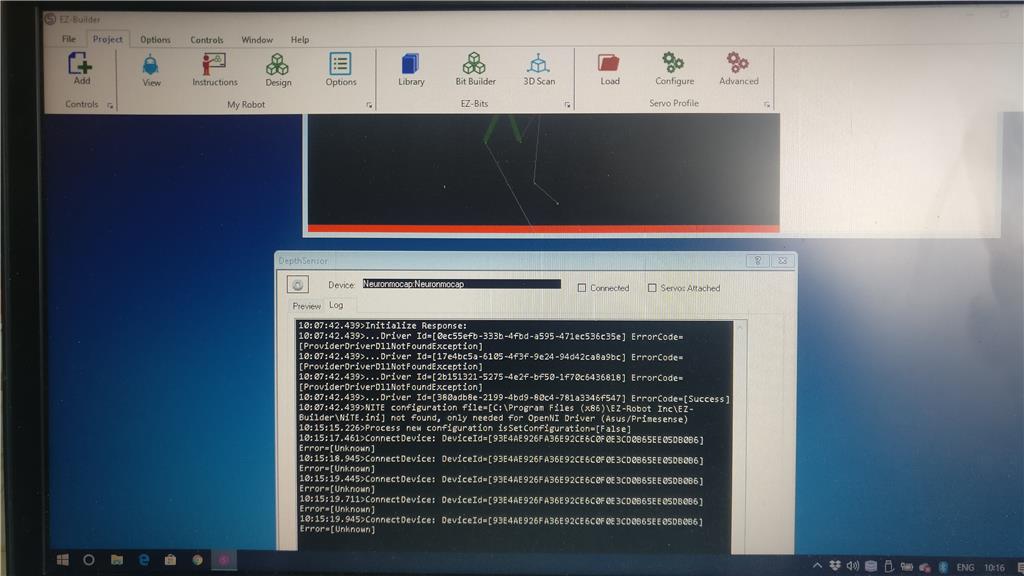
Wow. You are fast. Thanks. Tried it but now I can not choose my Xbox Kinect only Neuronmocap. JD's plugin still recognize the Kinect.