Asked
— Edited
Is This Correct
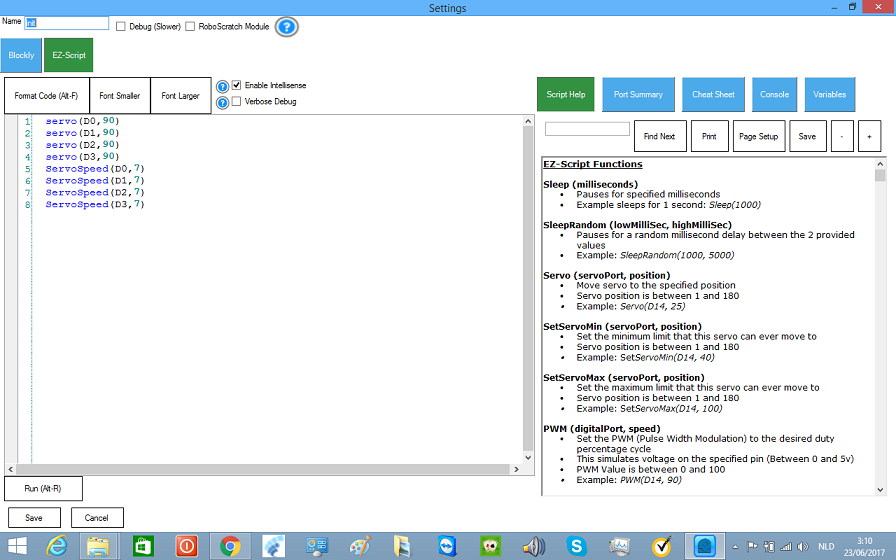
am building a hand.will this scipt slow the fingers down at start up.
 Soundboard (EZB)
— Play WAV/MP3 via EZ-B v4, manage tracks, add timed scripts for synced robot actions, control via ControlCommand(), volume and clipping indicators.
Try it →
Soundboard (EZB)
— Play WAV/MP3 via EZ-B v4, manage tracks, add timed scripts for synced robot actions, control via ControlCommand(), volume and clipping indicators.
Try it →

Yes - very very slow
And to have that script run when robot connects, put it in the Connection Control.
hi dj
am making hands two ,one whit big servo's and one whit micro servo's. excisting hands of a robosapien v2.its the way how it will be set up, that will help all who makes een inmoove hands.
Interesting. Looking forward to seeing what you create!
its just to show the guys who make inmooves,how to to close and open, the hand perfectly.its just a simpel solution.i put the init script in the , connection window next to the button to calibrate.. ok i want to go slow but not to slow.is 5 or 6 a better number?