Asked
— Edited
Ir Autonomous Home Base
have 2 ir recievers from my wall-e project. Looking to make a cheap/nearly free home base ir reciever.
Could they be hacked up to work with the ez-b and my laptop(and extention cables from my laptop)?
Could anyone point me towards a post similar to this?

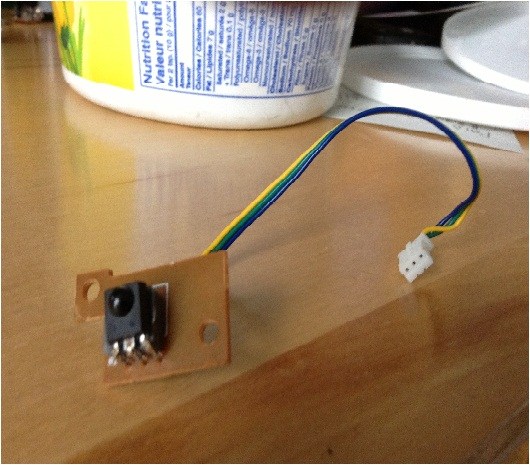
Not sure about that sensor. Are there any markings or part numbers on it?
Take a look at www.rentron.com
They have some of the best IR and RF stuff that I have ever ran across.
how could you get them to work with ARC?
Edit:noticed that it's one volt(1v) so without regulator not sure it will work.
the ir receiver on the website you gave me is the same!
Item: Vishay TSOP4840 Infrared Detector Module Price: $3.75 ea Part Number: TSOP4840
This is the replacement for the older Panasonic PNA4602M that has been discontinued by the manufacturer. This is the infrared detector module used for the Fire-Stick. This detector module includes a visible light cutoff resin to help eliminate interference from visible light sources.
Here is the "serial" tramnsmiter for it. Fire-Stick II [ Fully Assembled ]
Item: Fire-Stick II [Assembled] Part: FS-II-FULL Price: $24.95
This is the fully assembled Fire-Stick II ready to go without any waiting, worrying, or soldering ......! Note: If you do not have an IR "infrared" module, you can purchase them HERE. We recommend the PNA4602M.(what i have)
So first, how would i connect it to the ez-b?
then how would i hook the tramsmiter up?
I'm looking at those three prongs near the power cable on the back edge.
yep i was right.
THAT a very common IR receiver ,the panasonic PNA4602A is not used any more
THE TSOP4840 is a replacement,now to use it ,its not easy
first you need a IR TRANSMITTER and it ,second on the receiver side TSOP4840 there are 3 wires red 5 volts ,gnd and white output,IT HAS LIKE A SERIAL OUTPUT or PWM ,depending on the input
On output you need something to read PWM output or a circuit like the sharp IR sensor that reads distance to analog output
I am getting ready to work on a design using that type of receiver,its kinda hard Reason is that so far EZB doesnt read pwm values,thinking it might use the same pins at the sonar called ECHO ,but DJ hasent made any script to read the values
TAKE a look at the pololu beacon circuit it uses that receiver and it talks about how it works
I am electronic engineer,so desiging circuit super easy for me
what about "sharp collition". it reads values doesnt it?