

Iotiny/H-Bridge Help Needed Please
This is the first tech help post ive posted since i joined, there's something i just cant figure out..
Ive been having a lot of trouble recently trying to connect 12v motors through a h-bridge and the IoTiny.
Earlier magic smoke came from my IoTiny so now i have plenty of time to work out what ive done wrong and possibly get some help along the way..?
Im VERY confused as to connecting motors with encoders to the Iotiny.
Also the wiring from the h-bridge has me confused. The 4 pins on the h-bridge, if i were to run cables from them to the Iotiny, there would be no room for the encoder cables I thought the encoder cables would bypass the need for running all those extra cables.
Is the Iotiny large enough to run 4x DC encoder motors? The pic here is of the h-bridge with the 4 pins.
Im only trying to get 2 motors to run at the moment.
This is what has me most confused, because of the encoder cables, can i forget about the 4 pins? It seems a very silly question for all the tutorials ive seen, the ezb4 needs those cables connected to speak with the h-bridge?
If i connect those cables, where would the encoder cables go? I see no room where they could possibly be connected unless....i need an ezb4..?
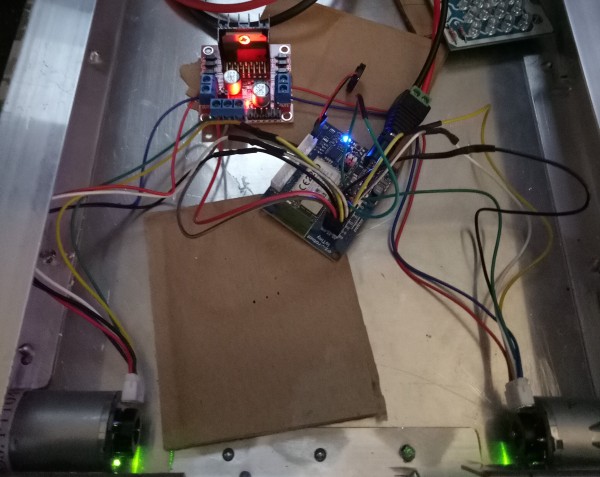
I apologize for my dumb questions, but i have spent quite a few hours trying to work this out. In the end i just connected the encoder cables and for the first time i saw a green led on each motor showing, but of course something wasn't right for the motors never moved.
I copied the script into the connection established window, double checked i had the correct ports assigned, but playing with the Movement Panel gave no motor movement.
Ive searched online and can only find encoder motors being connected to Arduino/Raspberry and nothing else.
Any help would be GREATLY appreciated thanks.
This is what happens after spending hours on something, you slip up and let the iotiny touch metal... sleep Silly mistake.

Without some serious coding (and even then I am not even sure it's possible) you are not going to use encoders with an H-bridge and an ezb4/ioTiny combination... What you need is a sabertooth and a Kangaroo controller.. The Kangaroo with the sabertooth 2 x 12 will give you encoder feedback a position control...
I was just reading AI's link on the sabertooth...oops i mean Kangroo...im using the wrong h-bridge's arent i?
@Richard,
you mentioned serious coding is involved, so should i ditch these motors and get ones without encoders?
I thought it was just forward/back/left/right..hmm im out of my depth...again.
I need to go to coding school or something.
An H-bridge is a broad term... The sabertooth is an advanced H-bridge it uses serial control to control motors instead of setting multi io ports on and off... In my opinion it's so much more simple and convenient to use than a standard H-bridge... So what you need if you are using encoders is a sabertooth 2 x 12 and a kangaroo controller... Google Dimension Engineering for more info on both of these...
If you don't need the encoder feedback (just simple motor control) then a basic H-bridge is all you need to control 2 motors (that is speed and direction)
Thanks for your help Richard, you answered my question.
I thought this was going to be a simple project, but wow another one bites the dust...
So in regards to the coding, how much different are they to run than motors without encoders?
You can still use those motors you have. You only need 2 wires from the motors to your H-bridge. Usually the motor + and - wires are black and red...
It was to eventually be autonomous, well almost, so i thought encoders would be good for it.
Looks like new motors, saber/kanga and an ezb4 is on the to-do list....not sure if i want to go ahead now....i feel totally stupid.