
3dfixer
USA
Asked
— Edited
Inmoov With Ezb
I have purchased 2 ezb’s and was wondering two things. Where Can I mount them. And how do I connect both at once so the ARCs can move in synchronization.

Hi and Welcome aboard! You have some tutorials to do here and these solutions will soon become self evident but let's get started for now!
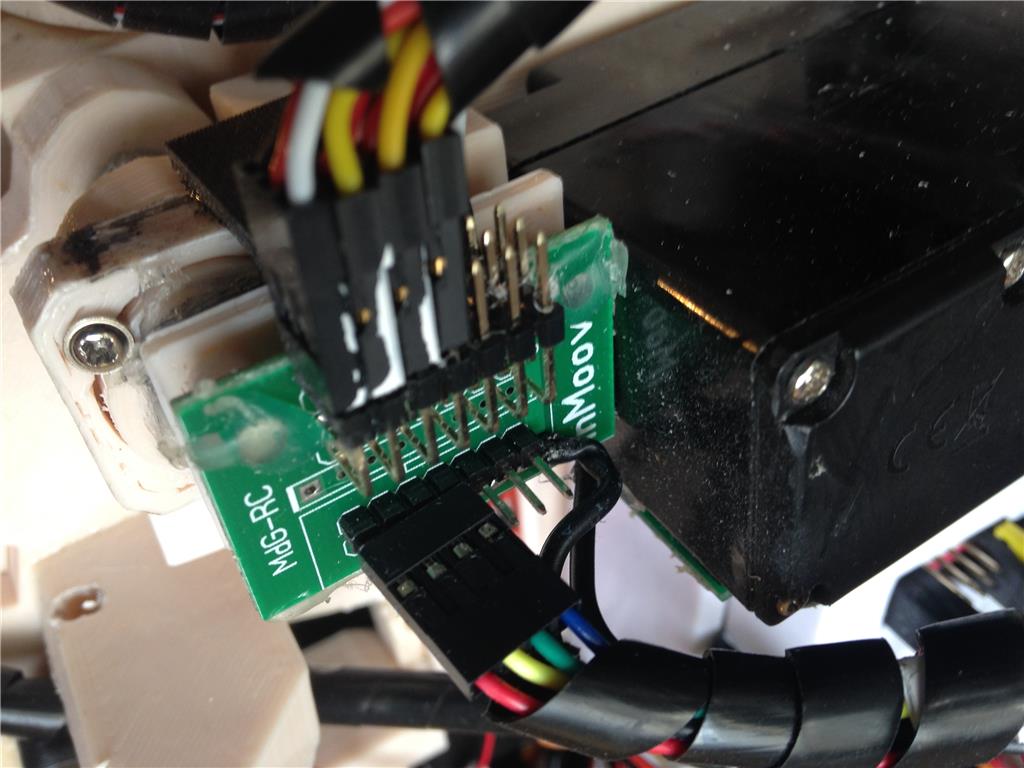
You can mount them wherever is convenient. Never mind my messy wiring as I am in the middle of a reconfig but here is mine.
Both EZ's will connect to your home network. You can then access them both in the connect panel. See the top two IP's below.
For now, connect one. Play with it and then integrate the second. I ran my bot for months before I got a second EZB
Perry
Yes welcome to EZB's forum. I too mount mind where Perry_s mounts his EZB's. I however, mounted it without the base so it would have more room when the PC table is mounted on the back cover. The only thing with my setup is it voids the warranty because of how I soldered the power wires. I used hot glue to mount my EZB's.
Hi here is my solution. Simple assembly and disassembly EZBv4.
https://www.thingiverse.com/thing:2498185
Hi @Drupp, Thanks for the mount. It makes things quick and easy for my new project. I will incorporate an audio jack support on the outside for my remote speaker.
Here is the mount I designed for mine.
www.thingiverse.com/thing:2501214
hello Everyone my name is Paul From Columbus Ga. First off. I like to say how Happy and excited i am about making the Inmoov this will be the body of our AI Virtual Assistant Denise that's on our computer. I'm wanting to give her a body and hopefully one day get her to walk, but baby steps got to start at building and all first. Its only going to cost us 848.48 dollars for all the hardware and servos needed I dont think thats bad at all .Were going with The EZ Robot builder boards cameras for eyes it can do more and is more cost effective for us. My question is how much or about how many rolls are need to do the entire build? What kind of material ? and what Size. I look forward to hearing from you guys and working along side you all and for any help I might need along the way when building this awesome humanoid. I'm hoping to make her like Sofia the ai humanoid is. yours truly Paul .
Hello Paul , Welcome! I have used about 12 rolls of ABS so far. There is some good printing time ahead of you!
Hi, here is my list of used filament, time and price. I hope it will help. Good luck Drupp Inmoov.zip