
Louis T
USA
Asked
— Edited
How Can I Use Sharp Ir For Cliff Detection?
I got two of these i want to use on Wall-E and have him run without falling off the table. Asked robotmaker, he said i need a specific script for this to work but he didn't post any example, so basically im still clueless

Hey man you may want to consider this if your robots bottom is a couple inches from the floor which is most cases for the med to larger bots. I have these https://www.pololu.com/catalog/product/1136
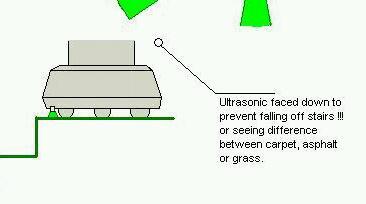
You mount them at a 45 degree angle towards the edge you are protecting from a cliff , place the close the the wheel as possible and the 45degrees angle when mounting gives you a couple inches headway to see the cliff.before the wheel is there , bots cannot stop on a dime so that's super valuable.
Thanks but I want to try what i have first. Understood the mounting part but how do you setup in ARC?
I have not set them up but there is a tutorial for sharp sensors , if you use those sensors be sure to get them close enough to the floor or your bot could randomly perform your cliff detection script causing it to stop or backup ect at random due to various floor textures. Well a digital or sensor is just a 0 or 5v out which is on off , so you just use it like a on off switch.
https://synthiam.com/Tutorials/Help.aspx?id=21
https://synthiam.com/Tutorials/Help.aspx?id=61
Hope this helped , I have not started learning nitty gritty of putting script together.
Thanks man...I have read all the tutorials but didn't know how cliff detection work or any different from object detection. Is this like the opposite of object detection? if distance is further than floor/edge of table, sensor reads 0v, robot do something, am i understanding it correctly?
Right , the sensor itself probably has a adjustment screw to adjust what distance the 5v output is triggered.