
Dave L
USA
Asked
— Edited
H-Bridges
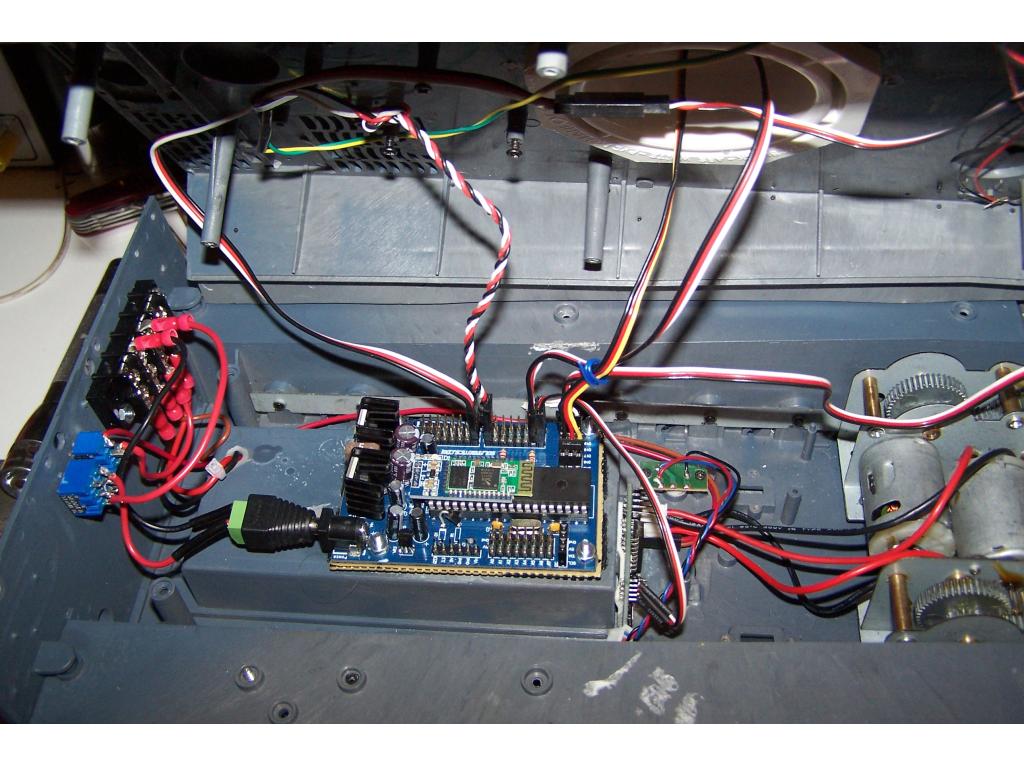
Good day folks! Anyone have recommendations for an alternative to the BV-4113 Motor Controller? Looks like my Dogbot (dog baby sitter bot) requires more power than the BV-4113 can deliver. Oddly enough the Tank's motors in its original form only pulled 1Amp, but when connected to the BV-4113 they now pull 2 Amps, which causes the motor controller to shutdown to prevent overloading. If I connect the motors directly to the 7.2 Vdc battery, they run smoothly and as fast as before.
Thanks for you recommendations! AND DJ, thanks for creating a very cool product !

:) thanx dude
Are you providing direct power from the battery to the HBridge Motor Supply?
I use the BV for my omnibots, and they draw a lot of juice. I wonder why yours is so power hungry
@ DJ Why not hook motor controller to a relay so your getting juice straight from the battery and low load on motor controller. You can get solid state relays that are super fast too.
DJ, I do run the battery straight to the Motor Controller. I suspect its because the tank tracks are fairly heavy as they are metal tracks.
Jstarne1, I prefer the kiss method. The more complex the project, the more things to troubleshoot later!
I only suggest a relay because it completely prevents risk of damage due.to stalling and reduces running temprature of a h bridge. If you ever fins you need to draw more amps I don't.see.why a.relay wouldn't work. @dj do you agree with this , usingbh bridge to trigger relay if your motors draw more that h bridge rating?
I found that replacing the 7.2 battery with a 9.6 made all the difference in the world. It dropped the current back to 1 amp, but did cause the BV-4113 to get hot real quick, so I will need to rig a heat sink.
@Dj, I didn't notice the VR on the EZB getting hot, is there any issue using 9.6 vdc to drive it?
Voltage regs getting hot when you pass up 6 volts is normal you really need to attach a large heatsink and fan. Also be sure to use good thermal paste like arctic silver 5 for CPUs. The heatsinks that fit two regulators well are basically gpu heatsinks https://www.ebay.com/itm/Very-Small-Unbranded-Aluminum-Heat-Sink-and-Fan-Screws-1-3-4-inches-center-/370581010535?pt=LH_DefaultDomain_0&hash=item5648597867
I'm going experiment with an Adafruit motor shield along the way to my first big robotics project (a Hearoid). Like DJ's Omnibot it's fairly heavy and I expect to have some cooling issues. Not the most elegant arrangement but its what I have on hand and that fits the budget for now.
Just read the following and I'm reconsidering the motorshield idea.
Ok. The L298 was designed for low current / high voltage (up to 46V) stepper motors. It can also drive 2 DC motors. The Arduino motor sheild includes some additional logic making it easier to drive DC motors. This does not mean it cannot drive stepper motors, only that the code will be different.
From my personal experience the L298 is a poor choice for robots unless you need high voltage and low current. Although it can handle 2A per channel it needs a huge heatsink to do so for any length of time. This is because it has a relatively high voltage drop. Every robot I made using this chip (Pictomatix, Mr. Tidy are 2) suffered from poor torque due to the high internal resistance of the chip and overheating. You are better off stacking some L293D's in parallel.
I just pulled the base from my Hearoid and am ready to start testing just how many amps the stock DC motors with gearing (assumption) are pulling.
Hi DJ,
In this clip on YouTube :
https://www.youtube.com/watch?v=gxrjo9Z6wkY&feature=g-all-u&context=G200c88dFAAAAAAAAAAA
you are using a 4 Amps H-Bridge. This one really looks interesting. I can't find it in your store here. There's a lighter H-bridge (sold out) but I want the heavier thing. Suggestions where to order/buy ?
Thnxs and keep up the good work,
PhG