Boon
H-Bridge, 1 Motor, Seperate Battery
Hi,
I'm sorry if this has already been handled in other threads, i have a quick question about the 2.5 Amp Motor Controller from this website.
I plan to power only 1 motor with it, and i want to use a separate battery, i.e. not the same one as for the ez-b and servo's etc.
Is it correct to connect both grounds of these separate batteries together? Also, when only powering one motor, do i still need all 4 of the IN ports (white wires in tutorial video)? If someone has a schematic that would be greatly appreciated.
The standard H-bridge controll in ARC will attempt to controll 2 motors instead of 1. I assume i should use the custom Movement Panel for my situation.
My bot will have 2 front wheels with a diff, and a single wheel at the back with a servo for steering.

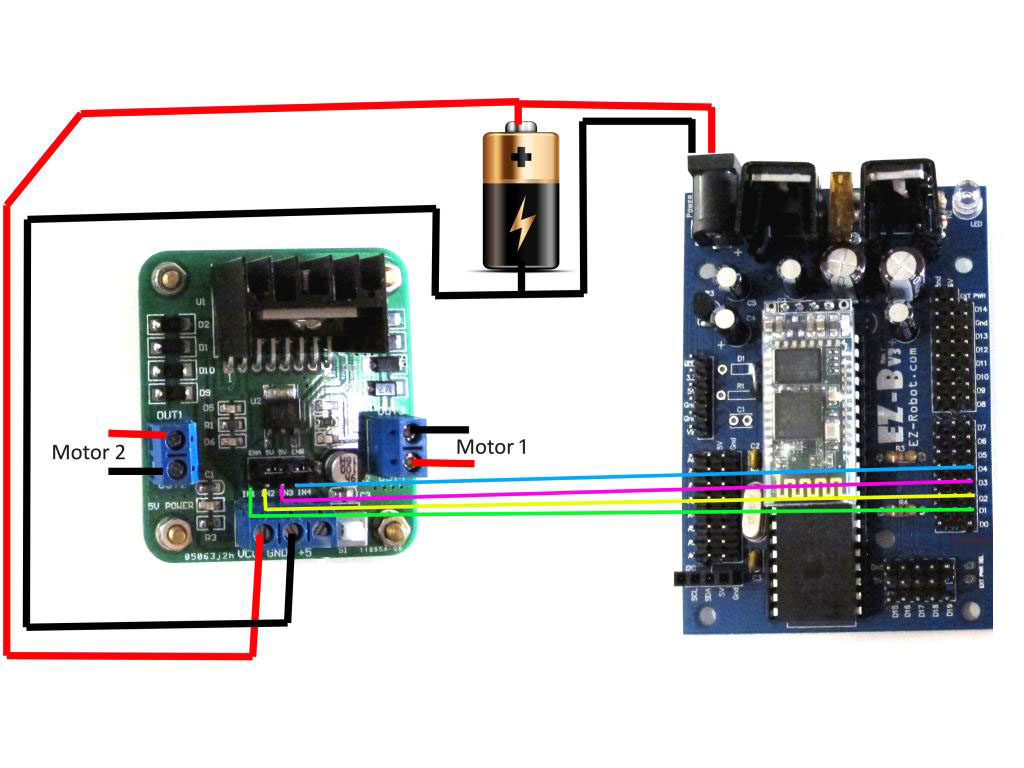
For one motor (or one side of the h-bridge) you only need to run 2 different signal wires from two different digital ports on the EZ-B to two pins on the side you have the motor wires hooked to. In the image below that would be either the green and yellow lines or the pink and blue lines:
Also you only need to run one wire from another digital signal port to only one outside pin on the row just behind where you attached the above control wires. Also to the side you attach the motor wires. This is for PWM control. If you have two motors attached to this controller board and want to control the PWM for each differently then do not tie the back pins together as the video shows. Different wires to EZ-B signal ports and different PWM controls in ARC.
Yes you need to tie all grounds together.
Hope this helps!
Very clear. Thank you very much!
Glad I could help.