Moses58
USA
Asked
— Edited

Ez-B With Sabertooth 2X10
Hey Guy's
Can you give me some help? I included pictures.
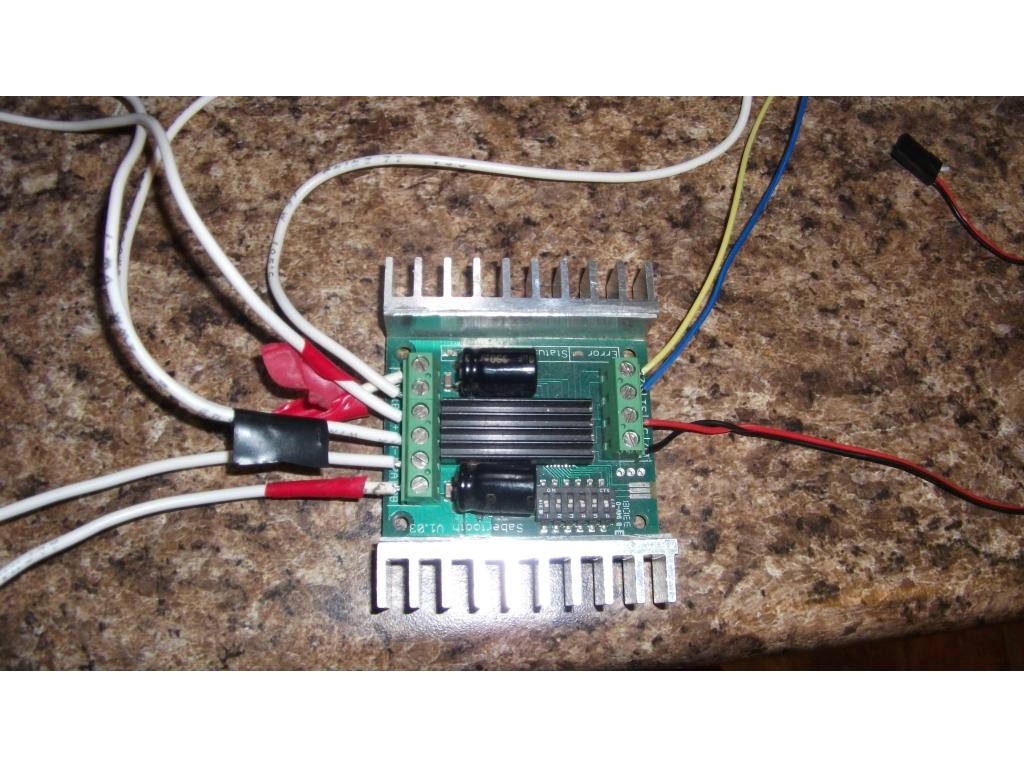
I have a large robot platform with big 12v motors. An ez-b V3 Sabertooth 2 x 10
Here is my problem. I tried all the advice on the forums related to this topic. So far nothing has worked perfectly. The motors will turn, forward and reverse but will not stop in the movement panel. I tried every possible Dip Switch setting from Sabertooth. I feel the problem is that I do not know if the wires are connected properly from the ez-b to the Sabertooth. S1 Blue wire to ez-b D0 S2 Yellow wire to ez-b D1 On the Sabertooth, do I need to connect the 0V and 5V to the ez-b? If so which port?


I'm not familiar with the 2X10. I have a 2X25 which looks similar.
You should have 0V (GND) and S1 & S2 connected.
My understanding is GND is required. 5V is not as unless you are using the ESC as a BEC to feed back +5V.
Hi thanks
I did add the ground but the motors will not move at all in this configuation. S1 Blue wire to EZ-B D0 S2 Yellow wire to EZ-B D1 0V to ez-b d15 ground
If I remove the ground the motors run again but will not stop in the movement panel.
So the problem must be in the Dip Switch settings.
I do not know what ESC as a BEC mean.
On the Sabertooth the green light is Dim but when I press up, down, right or left the green light is bright. I do not know if this is nornal.
When I use the wizard on Sabertooth website, I have tried all the DIP switch options. Maybe I am missing something.
Click on Add Control. Select Sabertooth. Add the Movement Panel.
On every control, there is a question mark button next to the X. Press that button and it'll bring you to a tutorial page for that control.
You only need one connection to the EZ-B for signal.
Hi DJ
This is a Sabertooth 2x10 which is the same as the newer 2x12. I have attempted every possible fix with no success. So I have to consider that there is a malfunction in the sabertooth. The green staus light works correctly, But there is no power to the motors unless the ground wire is removed from the ez-b. Removing the gound will cause the motors to run in uncontroled jumping patterns. The ez-b works fine and I have tested all the digital ports with servos.
So I guess I will have to order a new motor controller. It needs to move a 75 pound robot.
Thanks
You configured the DIP switches like the tutorial page? There should only be one cable connected from the ez-b to the sabertooth - that's signal, +5 and gnd. The jumpers need to be set for serial mode.
Here's the direct link to the control help: https://synthiam.com/Tutorials/Help.aspx?id=173
Control can be found in Add Control -> HBrdige -> Sabertooth Movement Panel
Make sure that is the control you are using.
From you above photo, i see a cable to connect to the Ez-B but there are only Black and Red wires.
The cable should have 3 wires. Gnd, +5 and Signal. The signal connects to S1 on the sabertooth
DJ,
Are you sure he needs the +5V?
Would that not be back feeding +5V to the EZ-B?
The motor driver has a microchip on it that requires +5 to operate - much like the l298n or any others
The +5 is not to be confused with the motor power... That's separate.
Yes I understand the difference,
From the 2x10 docs.
"The 0V and 5V connections are used to power and interface to low-power control circuits.
The 5V connection is a 5v power output . This is useful for supplying power to low-current devices, such as a potentiometer or a radio receiver. The 5v terminal is capable of supplying 100 milliamps if the source battery is 12.6v or less. If the source battery is greater than 12.6 volts, the 5v terminal is capable of supplying 10 milliamps. If more power is needed, we recommend using a ParkBEC or DESW050 to supply the needed 5V power to the rest of the robot.
The 0V connection is the signal ground for the Sabertooth. In order to receive input signals correctly, it must be connected to the ground of the device sending the signals."