
clintard
USA
Asked
— Edited
Ez-B Automatically Reconnect After Wifi Drop?
Is there a way to set the ez-b to automatically reconnect to wifi after the wifi drops out itself?
For example, im using my 4GLTE hotspot from my phone for internet on my laptop and i have the Ez-b connected in client mode. When a call comes in or i turn the wifi off and then back on, i regain connection to my laptop but i have to cycle the ez-b to get it to reconnect again.
Hopefully this is simple as i plan to use 4GLTE connection primarily with my rover

It will reconnect after a short disconnect, but after any real length it does need to be power cycled. (not sure what the length of time is, certainly less than a minute).
Alan
Ive yet to see it reconnect automatically. If i turn my router off and back on, i have to restart the ez-b. This could be really problematic if my robot were in a dark hole somewhere exploring and i lose wifi!
I wonder if this is something that is in or that DJ could add to the V4 x/2 communication board, or even a function we could flash in the V4 board with the OpenIoT software. I have hte PIKIT tool, I'll dig through the documentation a bit and see if there is anywhere to add a re-try interval.
I know at least one use did a hardware solution using a radio controlled switch that they could cycle with a pocket keyfob device, but that's kind of ugly for something that should be doable in firmware.
Alan
Looking through the bgscript file that is in the current firmware, it looks like when a WiFi connection is lost, it immediately tries to reconnect, but if that fails, it doesn't keep trying.
I think it would be fairly easy to modify, but I don't know if I will have time this weekend to try. Certainly sometime in the next week or so though.
If I get it working, we can discuss how to best get you updated.
Alan
This conversation has occurred a few times since the v4 release. It cannot be done on the current version. If your wifi disconnects clients, consider updating your wifi router to a more reliable product.
I have an ez-b v4 in my basement that has been online connected in client mode since Friday March 17th (that's 7 days).
This option can be added to the ez-b v4.x/2 in a firmware update.
Dj, are you sure the bgscript can't do it? I see where it can catch the disconnect, and the failure on connection, I just haven't found how to set a timer yet so it doesn't try in an endless loop with no waiting (although also thinking about sending a resey every 5 tries or so).
If you are sure it won't work I don't want to waste time trying to figure it out, but it looks doable.
Alan
I could buy the most expensive router in the world but if i unplug it and plug it back in after the ez-b has already connected to it, the problem still exists that i have to manually reset the ez-b to get it to reconnect. What if i cant reach the ez-b, or im using it remotely over the internet?
@Clintard_leonard,
I share your pain... for different reasons (Wifi Saturation/Interferences)
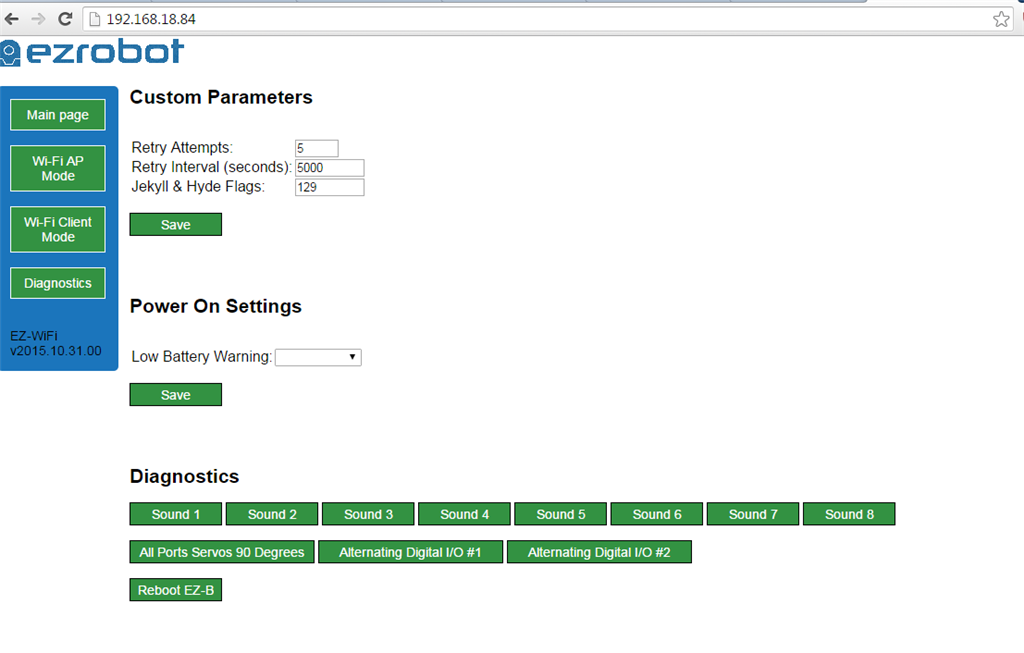
you can change/adjust the following parameters (Diagnostics Menu):
Retry Attempts: Retry Interval: