physh
Canada
Asked
— Edited
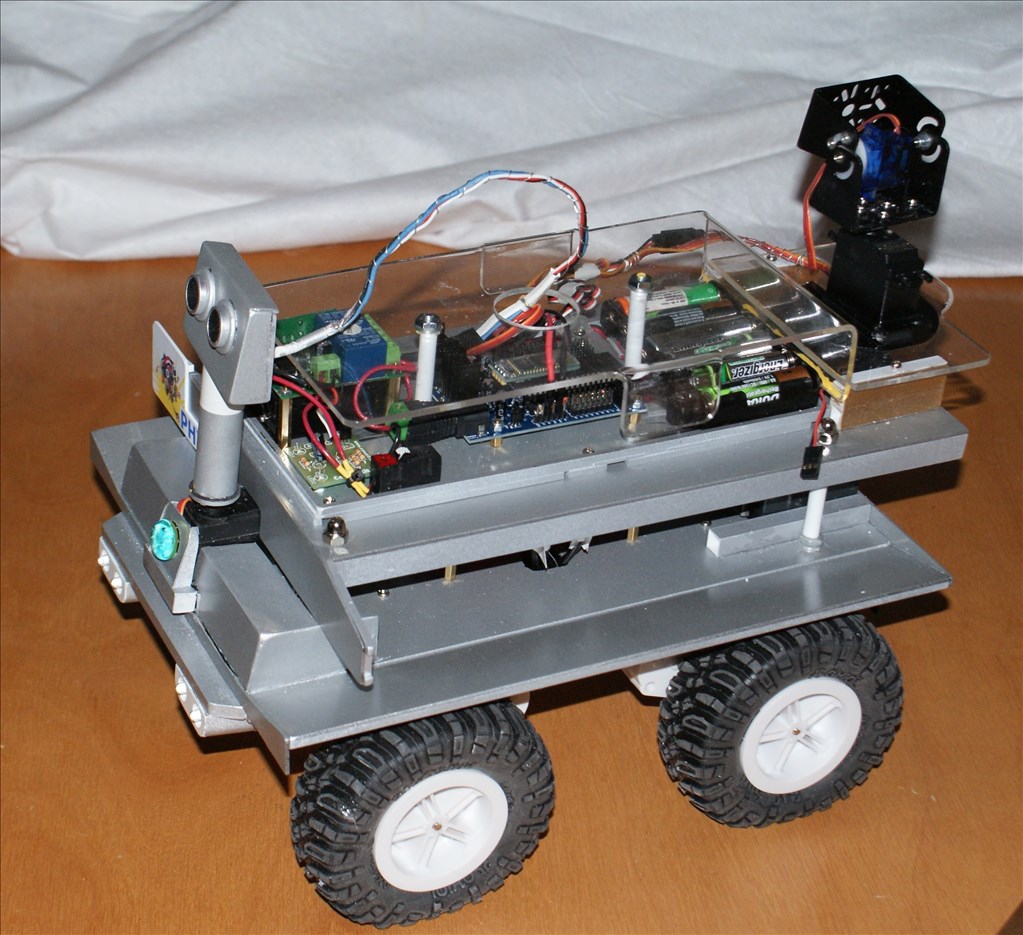
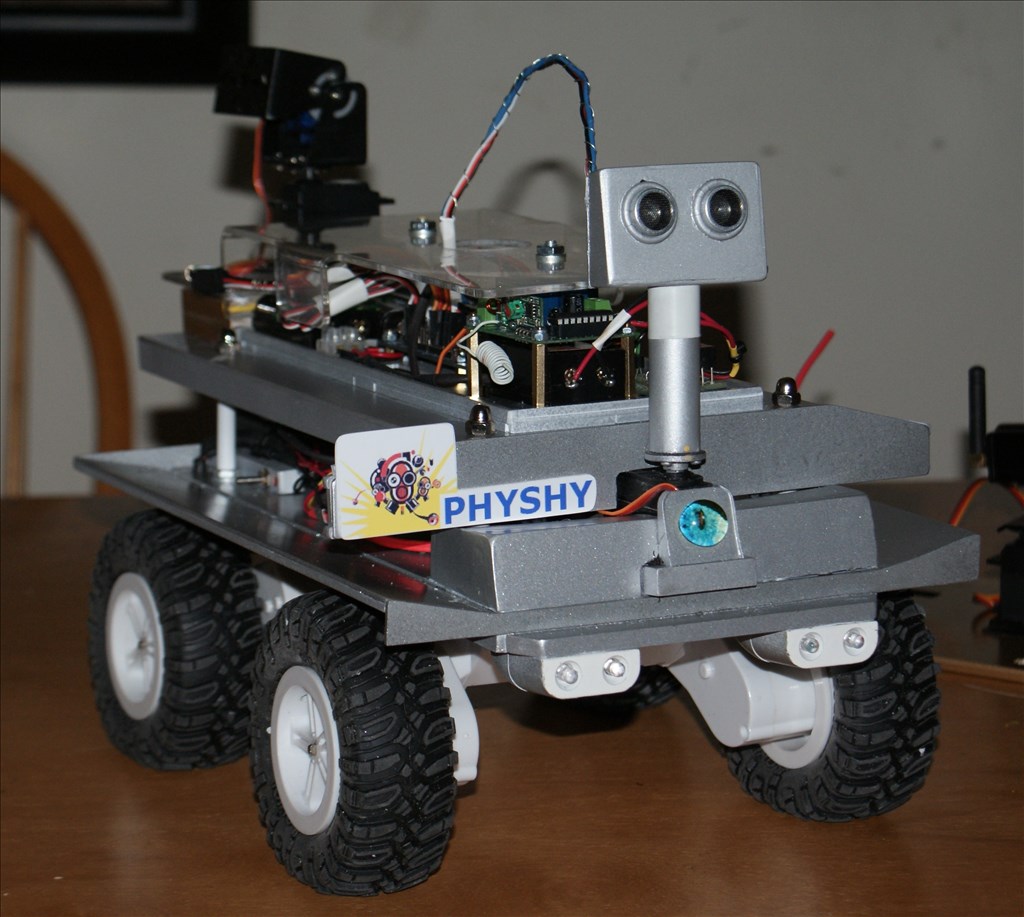
Hi my name is Graham. I am building my robot Physh on a Rover 5 4x4 platform. I have a Dagu 4 motor controller. I have been searching for a detailed schematic on connecting it to my EZ-B board with no luck. I have read in a number of articles that it is very easy to smoke the controller if it is wired incorrectly. I know about the 5v logic supply being connected before applying motor power. Now I'm scared to hook it up. I have a fair knowledge of radio control and electrical in general but I'm new to robotics. Can anyone direct me to a schematic or explanation of how to hook up the - CUR DIR PMW GND pins to the EZ-Bv3 board.

Check the cloud or look under my user details, there is a project with a link to the topic where this motor controller was discussed.
I'm not at a pc so can't search for you but its all there.you need 1 signal for direction and one to enable on each channel.
Rich, thank you for your speedy response. I found the file and downloaded it but could not open it. It indicates that there is a problem with the contents. I tried another xml reader and it reported the file was corrupt. Do you have a copy somewhere else? Thank you again for your response. Graham.
Rich helped me get this wired up. Check my posts for something along the lines of dagu rover 5 motor controller and find where rich laid it out. Good luck.
Here's the thread that covers the connections.
This should load, it opened OK for me from the cloud but I'll re-save it to make sure it is OK.
From memory I believe there was an issue with stopping, in that you need to set PWM to 0 as part of the stop script.
Thanks Rich, I appreciate your help. I got it all this time and will follow the directions tonight after work.
I know normally when someone sends a post they are answering questions, but when i read this forum I was so happy there were other people trying to do the same thing as me, plus it happens to be a recent forum. I too have been thinking about connecting this motor controller to the EZ-B, as for this motor controller allows for way more volts for motors over the smaller 5 volt motor controller on the EZ-B website.
I started by buying the smaller sized H-Bridge from that website, found out that to run them i needed 2 H-Bridges. As for i didn't have the time to wait for another H-Bridge so i hooked up the Rover-5 by connecting the 2 motors from each side together on one power output on the H-Bridge. But having only 5 volts split between 2 motors wasn't nearly as fast as it could be and the battery drained way to fast. (5 volts on its own is way to slow)
My plans now is to implement the Dagu controller instead, and use a laptop battery to power up the system. I am not sure which battery to use and how to charge it though, without over powering anything, and b/c everything is being boxed in to my robot (since what i am doing is building a robot that can travel though H2S safely, but b/c H2S can blow up from a spark, etc, everything needs to be air tight)
I think i have a basic idea what i need to do now, from what you have already said, but more information on the Currents would be very helpfull (not sure about the AC port part, do i need 1 or 4). Also if you know of a way to power up the Rover 5 (10-12 volts) and EZ-B/Dagu (5 volts) using a laptop battery, specific instructions. I would also like to know if i can get a 9/6 pin cable on each end that can plug into the battery, and be used for wiring to devices, and/or getting a 9 pin plugin (like the one that is on the battery that i can put on the outside of the robot for charging, having wiring run to the batter for extended length from each plug)
Thanks for posting the file, i downloaded it and merged it with what i have done already, then reconfigured for left and right, should run the dagu when i buy it.
and using one of these 2 laptop batteries to power the device. And using an external charger for the battery:
Apple Battery External Charger
Dell Battery External Charger
I do believe that pins 1,2,4 are negative/ground (-) and 8,9 are positive (+) but still confused how i can do this all. If you can help i will greatly appreciate it: my discussion: click here