
Nighthawk355
Custom Charging Application Issue
Hello all,
May i introduce myself, i am Garrett and am constructing a robot for a class project. I have run into an issue in charging my robot and have not yet been able to locate an answer in this forum and online.
My issue is:
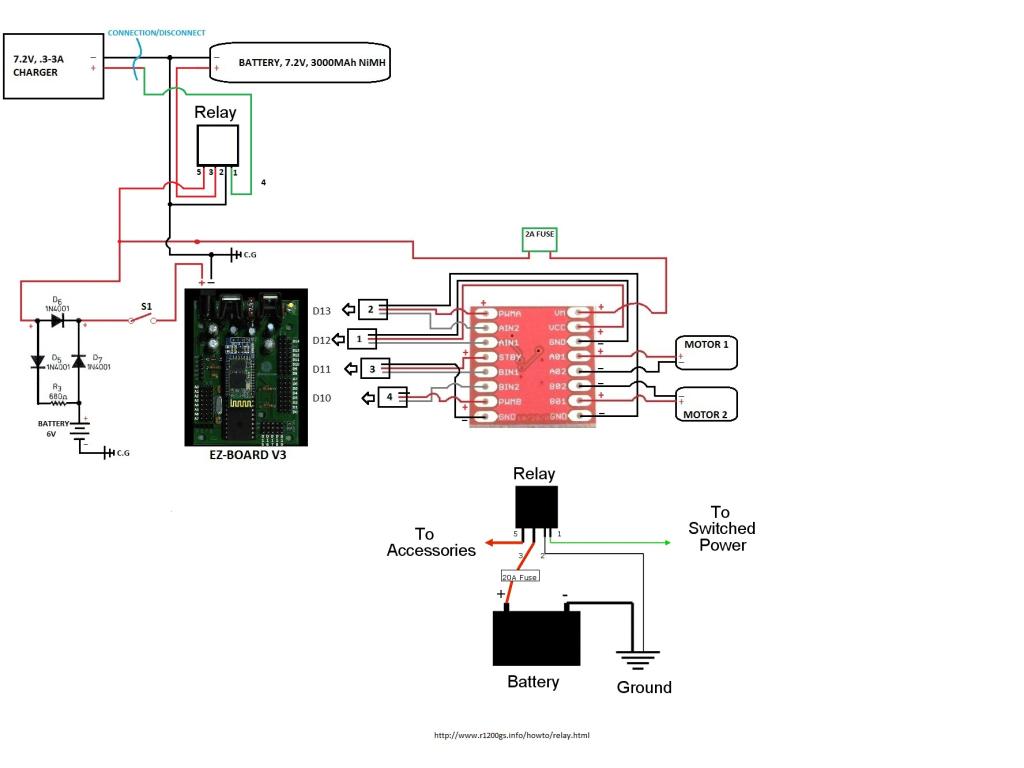
I am going to run two motors with TB6612FNG dual motor controller. To my understanding, i cannot run the power source for these two motors directly off of the EZ-Board... I must supply a seperate power source to the motor connecting it directly to the HBridge and a seperate power source connected to the EZ-Board.
I want to create a docking station that the robot can connect to and charge both the battery for the motors and the EZ-Board without turning the robot off. I cannot seem to find a splitter or the right information to complete this task.
Any ideas?
Thanks,
-Garrett

check out the OAP project for a idea,using something like that for my larger robot design using gell cell charger 2 charge 2 different batteries
OAP ROBOT PROJECT
ALSO HAS OTHER CIRCUITS THAT ARE USEFULL
Gel cell or lead acid battery chargers are cheap. Im.using a 1.5 amp smart charger from walmart for 20 bucks. Charges till its full or if it shorts it cuts charge or if battery won't take a charge the unit stops trying for.safety.
i mostly like building mine from scratch on docking station it charges 2 different batteries with different charges,now to keep your EZ ROBOT board you need a backup battery,dont need much current output ,just to keep it on while battery is charged drive batteries dont need it,another idea ,let say you need 4 amp battery charged,so use 2 2 amp batteries one stays connected while other gets charged,then have it charged second battery will need a small delay timer for a few second while switching batteries
@Nighthawk355,
I will come clean here. Many folks are saying you need separate power sources for motors and electronics. While that is probably true for industrial and heavy duty bots, I don't think it is a mandate, especially for hobby robots. I use a single RC car battery for my bot. I connect the EZ B to the battery directly with 7.5 volts. I run several motors using the EZB to provide logic control from the EZ-B and power for the motors comes direct from the RC battery. Common Ground. Everything works fine. You will hear that folks say brown outs will be an issue. If your battery is low or you have too much amperage draw, it is going to happen, but not as often as folks say if you pick the right battery and charge it before it gets too low. I would say that if you were making a 'remote control airplane' robot that must never ever loose control.... then go with separate power sources for your control electronics. If this is a simple bot project, I say go with a single power source.
v/r
Kevin
on small robot is better to use one battery,i think @nighthalk355, might be making a larger robot where you do do sometimes 2 batteries,like my avatar photo i have up,it has 2 batteries,special microcontroller board and itx board in photo it taken out for changes,sometimes motors need a seperate source for noises small robots dont use up alot of current,another very good reason to use to batteries is longer last time motors and servo's use of the most current,and other stuff and board use up some current ,so it is good to have 2 different power sources,another is motors sometimes takes higher voltage then lower current stuff
there is also simple divider circuit using one of the analog ports to detect low battery voltage,do need a zener and about 3 resistors
i don't know...the TB6612FNG is only a 1 Amp motor driver.
I HAVE A ROOMBA and it only lasts about 2 hours or less per charge and thats on basic roomba no vacuum parts so i made a special dual battery switching circuit and automatic charging circuit also when you add camera,EZB ,plus servos and other stuff not looking at much run time with a second battery design,one reason i use LDO in all my circuits low current sonars like MAXSONAR ,about 5ma compare to most AT 25 TO 35 MA,it all adds up
All,
Thanks for all of your input for the charging station. I do believe that i only need one 7.2V or like kkeast said 7.5V battery to run my entire robot. My robot is small and will only weigh around 6 lbs total and only need to be ran for 15 minutes at a time. So a single power source i think is just fine. My concern was more towards how i am going to tap into my battery and charge it while my robot is still connected to the battery... This way once the batter is charged i can just reverse the robot off the charging station. I am thinking i could just tap into the positive and ground of the battery and run those to the EZ-Board as well as my motor control board to run the motors.
-Garrett