rgordon
USA
Asked
— Edited
Anyone made a robot that finds its own charger and docks with it? What would be a good way to do this?
 Ultrasonic Collision Detection
— Stops robot movement (no steering) when an EZB-connected ultrasonic sensor detects an object within a set range; integrates with scripting and paused polling.
Try it →
Ultrasonic Collision Detection
— Stops robot movement (no steering) when an EZB-connected ultrasonic sensor detects an object within a set range; integrates with scripting and paused polling.
Try it →
Anyone made a robot that finds its own charger and docks with it? What would be a good way to do this?

This is something on my to-do list but so far all I have are a few ideas...
Charging base with QR code on for identification. Script for when battery low it will search for the QR code and make it's way to the charging station.
Charging station will help guide the robot in to position to connect the barrel jack to the socket, have thought about putting a row of wheels down both sides of a channel which slowly narrows which will line the robot up perfectly with the plug/socket.
When fully charged bot moves out by itself and goes back to roaming mode.
Just a few scripts to do this, a voltage sensor script to monitor the voltage for low level and for fully charged and one to find the charging station. I have the low level monitor script written (I think it's on the cloud and in the scripts forum) but haven't done anything about the station or finding it.
Another idea I had was to have the base station have two bare electrical contacts and the same on the robot so when it drives in they connect up and it powers the charger but having bare electrical connections isn't too safe an idea.
That's how the roomba does it
Actually, the bare contacts isn't such a bad idea if there was something else on the robot that could act as a key to activate the contacts. You could get a bit creative with it if you combined the channel idea with the bare terminals:
One side of the channel is the negative terminal, the other is the positive...as the bot travels up the channel, it lines up and makes contact at the same time. When it gets to the end, some portion of the 'bot (be it an appendage or some unique feature) lines up with the base to activate a switch and opens the current.
You would have similar negative and positive plates on the 'bot that are activated via the same appendage once it met with resistance on the base.
Just a thought.
Now there's an idea.
A couple of small prongs that fit in to a couple of holes in the station that will "enable" the bare connectors. Similar to how a UK power socket works with the earth pin opening the live & neutral terminals - no earth, you can't plug in and no bare terminals... this paragraph started with one idea and ended with another.
The appendage idea is giving me rather disturbing thoughts the robot having a penis... a novel idea... but one I wont be building.
The base of the Omnibot would be great for that idea though as the charging station could have a slot at low level which the base drives in to, activating a switch and turning on the power to the bare connectors... and the bare connectors could be hidden inside the slot out of the way too for extra safety.
I can see a lot of ideas being batted around in this topic.
The part which is going to be the most complicated I imagine would be for the robot to find the station in the first place though. For instance, mine will roam the downstairs of my house. It has no real way of knowing it's position. If it goes to low power mode while in the living room it would have to make it's way to the kitchen where I plan it's station to be but it would have no idea how to get there.
One way would be to use glyphs or QR codes dotted around the house but I would prefer to avoid doing that. Another would be GPS although it's not exactly accurate and none of my GPS enabled devices get a GPS signal indoors. Or a gyro or compass may work but I have absolutely no knowledge on those (yet).
I'm not sure what available sensors would work for this application, but what about an inductive guidance system similar to those used on forklifts: Forklift Guidance System
Something like this would definately require a hefty amount of forethought, but a signal wire could be used to guide the robot back to it's base. Of course, I'm not sure we're all willing to rip up our floors to do it.
On another Robot forum, someone was talking a few weeks ago about two different colored poles to line up with a charging doc. ARC can't currently track more than one color at a time, but DJ just posted within the last day in another thread that he will be adding multiple color tracking (in the traffic signal detection thread).
Great ideas here about contacts, switching, lining up to tje contacts. The charger I bought has an Amphanol connector, and I bought a socket for it, but it requires some force to connect, and depression of a switch to disconnect, so I may wind up not using that socket, or just using it as a travel charger when I take the bot out with me.
Alan
https://www.inventables.com/technologies/magnetic-switch-normally-closed
what about a switch like this one. mount on either the robot or charging station with the other having a magnet so when docked the magnet will open the current to flow?
Ray
If it's not supported by the EZB then it really doesn't help anyone very much at all and should be discussed on the relevant forums not this one.
There are plenty of great ideas on how to connect the robot to the power source now but the main thing would be to get the robot to find the charging station and make it's way there. Any further thoughts on that?
The main issue would be if the robot was in a different room to the charging station, take my house for example;
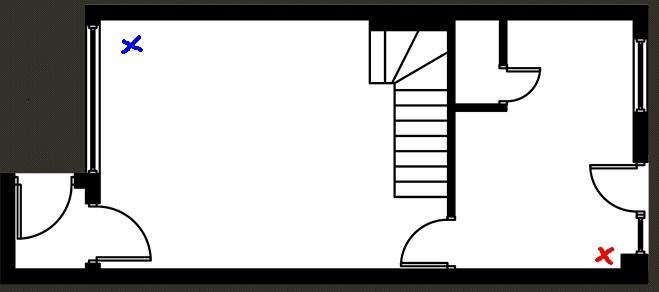
Assume the red cross is the charging station, the blue cross is the robot, no clear line of sight so rotating until it detects the glyph or QR code on the station wouldn't work. Also bear in mind there is furniture not shown on the screen grab.GPS is a no go as it's rarely that accurate and no GPS device I own or have ever owned has worked in doors.
I2C Compass? Could that do it?
N.B. Excuse the poor screen grab of my house plan, it's all I have access to at the moment.