armenvegas
USA
Asked
— Edited
Adding More Servos To Six To Get 18 Dof
I'm having trouble figuring out how to add legs(servos) to an already cool and working cloud app for Six. ive searched for hexapod and found a couple of identical hexs and I cant seem to find a working app that's been created.
I noticed that the servos are connected (for Six) D0,D1 then D3,D4, etc... is D2 and D5 and left open purposely for the additional servos?
ive tried to add the servos and ports in the builder but I'm having trouble. can someone please direct me to the obvious that I'm missing please?
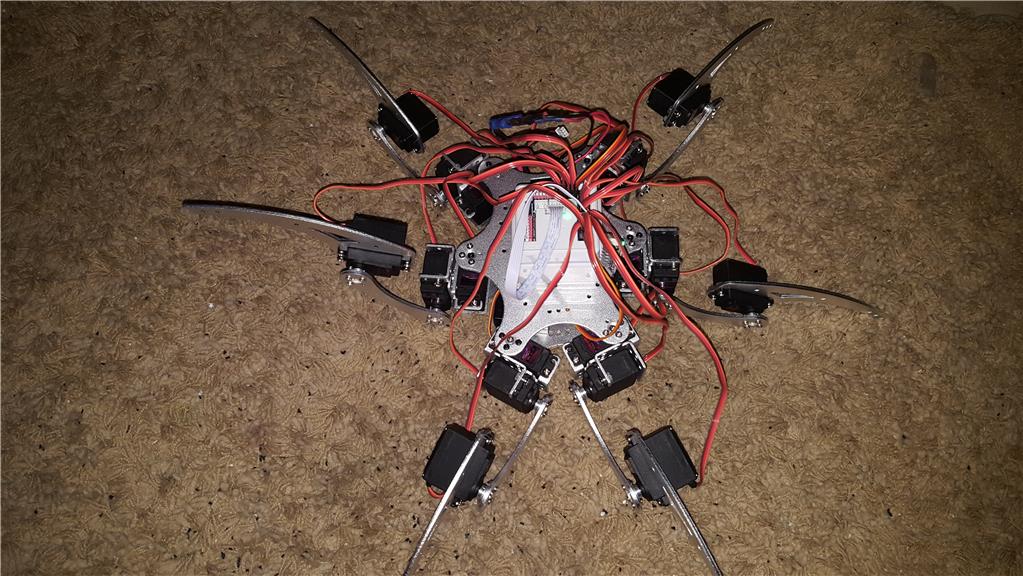
here is a pic of my aluminum hex
thank you in advance

Yeah it's really easy - nice hex btw.
Those ports were left for additional servos (although you can use any ports). So plug your servos into those ports.
Download and install ARC
Load the ARC project for Six
Good idea to save your project at this point with a new filename in your project folder
In ARC locate the Auto Position control. It has the words "Auto Position"
Press the ? (Question mark) to access help for that control. Here's the direct link that pressing the ? will take you to: https://synthiam.com/Tutorials/Help.aspx?id=180
Read the help, watch the videos, etc...
The learn section has more information than i can possibly type in a forum response. But, the gist is...
Don't be afraid of the learn section. It has sooooooo much detailed information. And the ? (question marks) on each control are super helpful. Read the entire pages of the tutorials because there's lots of hand holding in the learn section.
PS, post a vid of your hex when u get it rock'n later. I'm a fan of hexapods
thanks, I was there but I wasn't getting the box for added servos to follow my cursor... had to wait for the box to turn green. lol
thanks again