Live Robot Hack Session

DJ's Test Bots (Turtlebot 3, And K-8)
When:
Duration:
16 people have subscribed to this event
I will be upgrading my test robots with single-board computers (SBCs). I'll be adding the Intel Up Board and Rock Pi/x to each of the robots. The TurtleBot 3 and the tank (known as K-8).

Oh man, give me a roomba any day. Terrible platform, so fragile and with toy motors. It should have some kind of hinge system for easy access. What do you think of the d435i? Any advantages over Lidar at this point? Happy Easter!
I’m not sure if I want to continue with that platform base. I might modify the chassis to put ax-12 dynamixel servos to replace the plastic motors. Or add a kangaroo/sabertooth to the existing motors and encoders.
the d435 is great. Better than a lidar for false positives. Sucks it’s discontinued and impossible to buy
adding support for something that no one else can use sucks to swallow lol
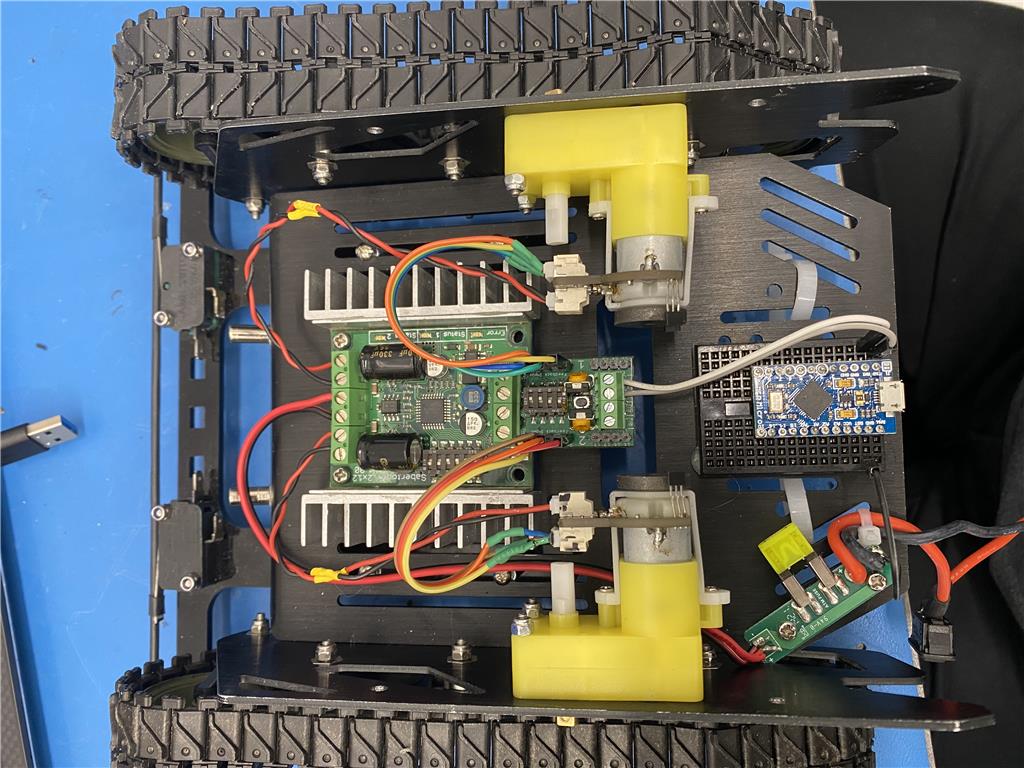
I added a sabertooth with kangaroo connected to the encoders. I’ll test it tomorrow. But I’m guessing it’ll fix the trajectory issue.i also added an amplifier on the speaker
Great live hack. Shame I missed it live (Family is important). I often wonder if people not in this space understand just how exhilarating it is when the robot finally moves.
Haha - except it moved crooked LOL
I hope this sabertooth & kangaroo combo fixes that. Otherwise, I'll replace those motors with Dynamixel servos
Ugh i've been fighting with Sabertooth + Kangaroo all day. Seriously, almost a full day of just trying to make the kangaroo work.
The kangaroo manual has soooo many inconsistencies. Not to include that the Sabertooth manual is the absolute worst - i don't know how their manuals haven't been updated in so many years.
Dip Switch Nitemare The biggest issue I found is attempting to understand the dip switch settings. There's no simple diagram that just says "here's the switches and here's what each one does". Instead, you have to scan the document and read paragraphs where you might catch a sentence that says "Dip switch #2 does this".... WOW who wrote these manuals? They're written like a novel...
Inconsistencies So I'm not sure what the sabertooth dip switch settings are supposed to be because they're referenced opposite of each other in two places...
OH but then I realized that in the second diagram, the little orange circle is the switch position - which took me hours to notice that I interpreted it in reverse as any other human would. Because the larger part should be the switch position because that is why you're using the document?!
I finally got the Describe software to work, which you have to use the beta version because the regular one will NOT connect. And there's a firmware update? That's cool and neat to see. Took about 20 tries with timeouts lasting many minutes... So that was a fun hour trying to update.
Oh, and still no working Sabertooth + kangaroo yet
More dimension engineering sabertooth + kangaroo inconsistencies in their manuals. And boy, I really can't get over how the manual is written. It really is written like a story and not by a technical writer at all.
This one involves the Sabertooth baud rate. Both the kangaroo and sabertooth talk via serial to each other. The kangaroo needs to know the baud rate that the sabertooth is set for. The kangaroo manual says the Sabertooth dip switches should be this to be 9600.
But the sabertooth manual says those dip switch settings is actually 2400
And in the DEScribe software, the sabertooth setting is 9600
I have no idea what is actually correct because I still can't get the two talking. And I keep getting an error flashing 4 times on the kangaroo of "invalid mode" so not sure what is going on there either. The DEScribe software is terribly documented. Seriously poorly documented. Check out this example...
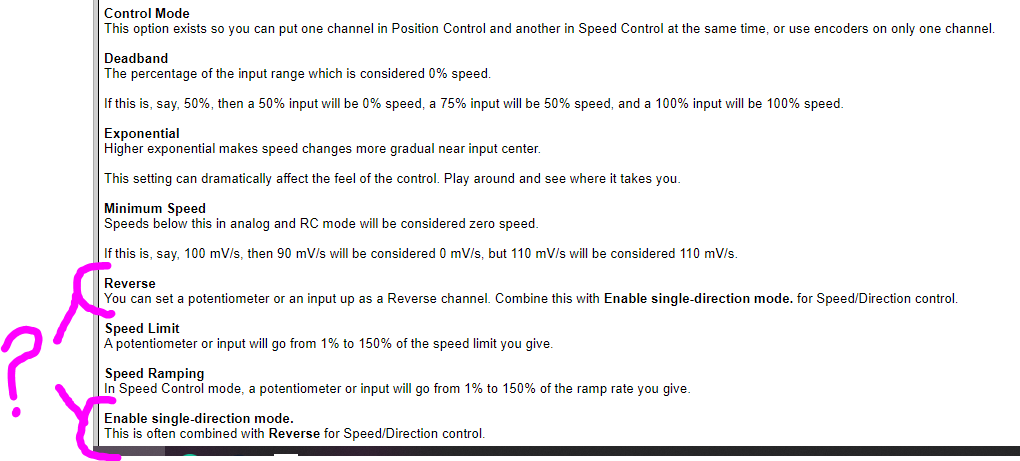
So reverse is used with single-direction mode. And single direction mode says it is used with reverse.... Talk about a recursive loop? What is going on hereWow - I have been persistent to get this to work and it's been extremely frustrating. The poor documentation and instructions lead me to have low confidence in reliability. Now I'm unsure why errors occur because I'm not quite certain how any of it works.
I'm still fighting to use it - but I do not believe the outcome is going to match what I'm expecting. My outcome is to have the controller use the left and right wheel encoders to maintain trajectory. Meaning, I want to instruct the robot to move straight forward and it does so. I'd also like to have it slowly turn 10 degrees to the right, and it does so. This would be similar to how the iRobot Roomba operates.
However, I do not believe the sabertooth's velocity speed mode offers this functionality.
I'll give it another shot tomorrow, but I'm guessing the solution will be some custom arduino code. The good news is that if i end up creating a PID based motor driver in the arduino with the EZB firmware, it'll be useful for other projects.