Asked
Skill For Controlling Waveshare Serial Servos Type ST Series
These servos are high quality and the type ST3215 is also quite inexpensive. The type ST3025 (BL / metal housing) is suitable for semi-professional use. Robots for show cases and longer operating times could be equipped with this. The servos can already be activated with the Feetech RS RS485 skill. The two communication protocols are probably very similar. However, no positions feedback can be read back. I think this can be achieved with an appropriate modification of the exisiting Feetech skill. This makes it a Feetech / Waveshare skill. Certainly very useful with probably little effort

Sorry, the servo didn't move in any of the test cases. It was always released.
This is the case with and without the RTS signal. Since the Scill has a kind of terminal, I simply copied the displayed feedback for the respective test cases. This way you can see whether and, if so, how it went. Sorry if that was misleading
Hmm okay - let me take a look at a few more things tomorrow if I can squeeze in some time.
Next time you paste stuff, put it in the code tag is always a good one. that's with the [ code ] and the [ / code ] . that is useful. otherwise it gets squished all together
I found another document from Waveshare about the protocol. I hope it helps.
Waveshare documentation
..and here the comparable document from Feetech
Feetech Smart servo Communication Protocol Manual.pdf
The documents you shared are for BUS SERVOS, and you're not using a bus servo. You are using an RS485 servo, so those documents do not apply.
According to this, the ST servos are compatible with the dynamixel AX series protocol. So maybe use the dynamixel robot skill?
Waveshare servos are rebranded feetech.
Ok, thanks, I'll try that out tomorrow. I'm using an Arduino UNO for that. Do I understand that correctly? RX and TX are connected in one wire? That seems unusual to me?
you should be using a dongle or USB controller made for the servos. If you're not, that's also why you can't get them to be fully functional. RX and TX are both required
if you're using an EZB, you need to have TX and RX connected together because the single wire uses bidirectional
if your servos are rs4285 4 wire, you need to use a serial to rs4285 converter
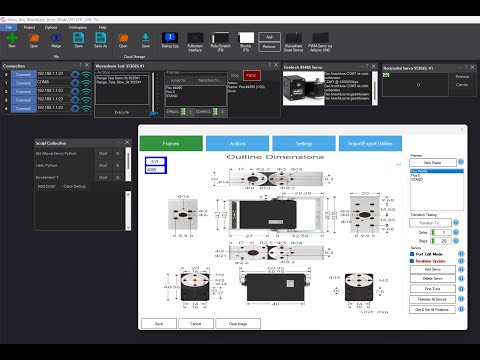
Yes, of course the servos are addressed via a USB controller. Here is a schematic diagram to clarify the current setup.
I will try the Dynamixel skill today, by using the ez-b v4 for this.
I am very excited to see if it really works.
Feedback on the Dynamixel skill with Waveshare servos
Servos cannot be addressed. There is no connection to the servos, ping fails. Voltage is correct, addresses are correct, ezb is running and can be addressed.
Test with PWM standard servos works.