
 Completed
Completed
 Get ARC Pro
Get ARC Pro
Problem with multiple instances of Feetech RS485 servo Skill.
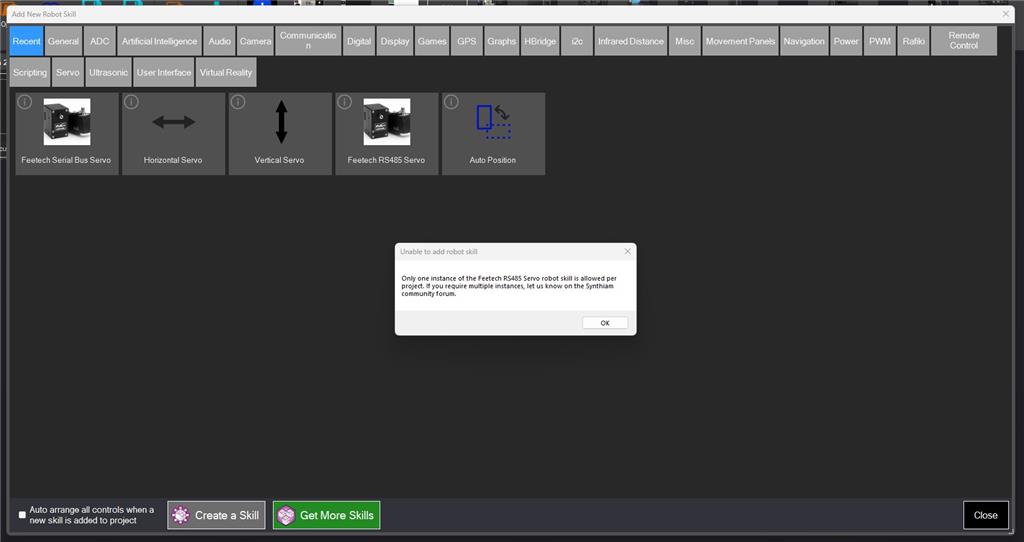
I need two Feetech RS485 servo Skills in my projects to control servos with different baud rates. For example, ST series 1000000 baud, Feetech tp SM-1500-C001 runs at 115200 baud. I then adjust the baud rate outside of ARC using virtual COMs. I have used this in some of my applications and it has worked without any problems so far.
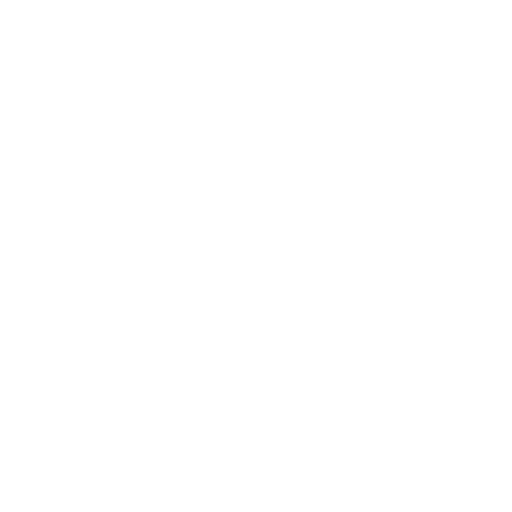
Today I have noticed that the option of using these skills multiple times in one programm is no longer supported ?
I would very much like you to undo this change.
There are certainly useful applications that require these skills to be used multiple times in one application. For me personally, it is a huge problem, as large parts of my robot projects run with different servos, Feetech, WaveShare, etc. based on the same protocol but with different baud rates. I'm currently trying to keep myself afloat by making a copy of the old programs.
This is obviously extremely time-consuming and not future-proof for me.
An alternative solution could be a second skill with 115200 baud, just in case there are problems using two of the same skills, which has worked so far! That would mean two different skills in one application.
I would be very happy if multi-instance support could be reactivated. Thank you very much for your support.

Done. The latest update includes the plugin definition for multiple instances
Wooow perfect and extremly fast.
Thank you!
I was afraid I had just invested more than 400 in a servo concept that is no longer supported.
A presentation of the new robot will follow in the next few weeks.
I saw in the last release notes that the new default value is no multiple instances. I think the idea is to have people request it when they need it enabled for a specific robot skill. This is because several robot skills don't seem to handle multiple instances correctly.