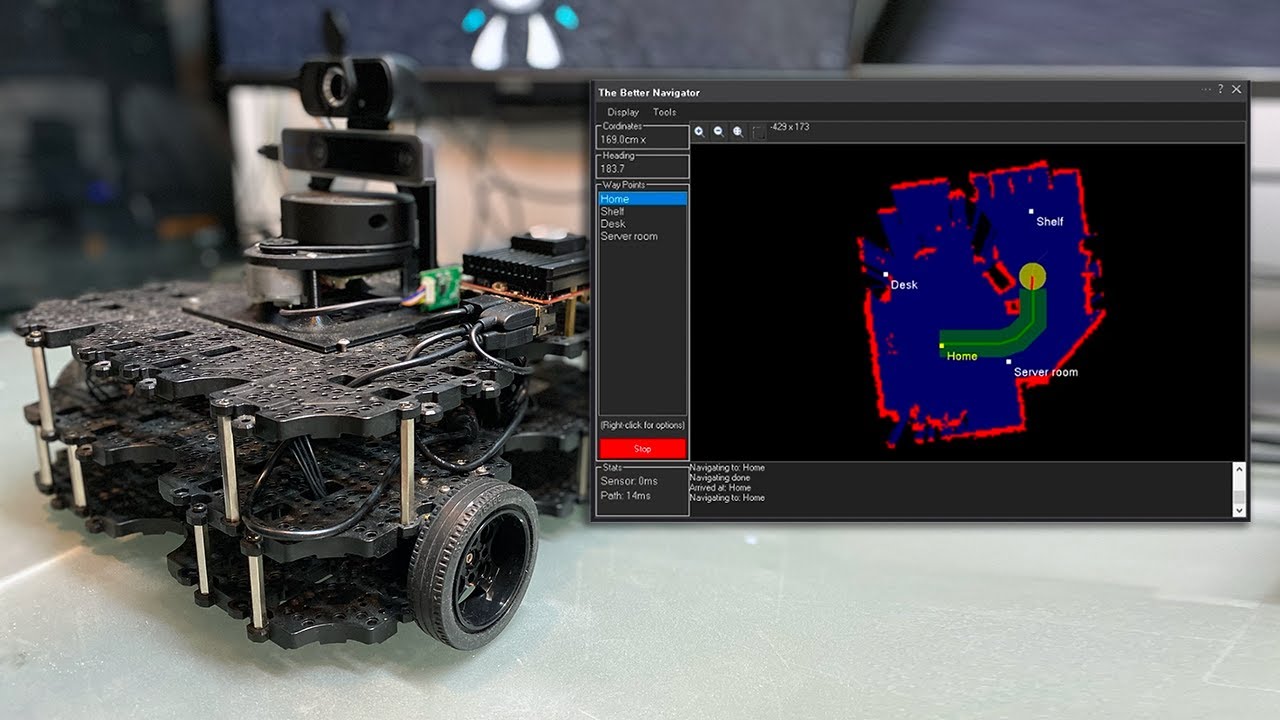
How to add a 360-degree lidar to a robot for autonomous navigation. Create and save waypoints that the robot can navigate to. In this video, The Better Navigator in Synthiam ARC with a Robotis TurtleBot is used. See some links below:
 Command Duplicator
— Duplicate and synchronize commands from one master EZ-B to multiple slave EZ-Bs for simultaneous, mirrored robot actions.
Try it →
Command Duplicator
— Duplicate and synchronize commands from one master EZ-B to multiple slave EZ-Bs for simultaneous, mirrored robot actions.
Try it →
How to add a 360-degree lidar to a robot for autonomous navigation. Create and save waypoints that the robot can navigate to. In this video, The Better Navigator in Synthiam ARC with a Robotis TurtleBot is used. See some links below:

Hi DJ, i have a question. Does the BNavigator use and take advantage of the absolute encoder on the Dynamixel seros?
I tried to use that before, but the slip on the wheels and slow poll time made the map bonkers and drift. It's something I can include in the dynamixel robot skill one day if you want to try it - but I doubt you'll be happy with the results as well
All of my attempts with wheel encoders have resulted in pretty lousy drifting. Something to note is the best wheel encoder robot that I've ever used is the Roomba! Surprisingly the NMS works well with it. They designed the Roomba very well. The radius and wheel position is perfect for rotating and turning on the spot where other robots slip when turning.
Mounting a lidar on a Roomba base is an amazing experience. I should do a video on that one day!