Hello!
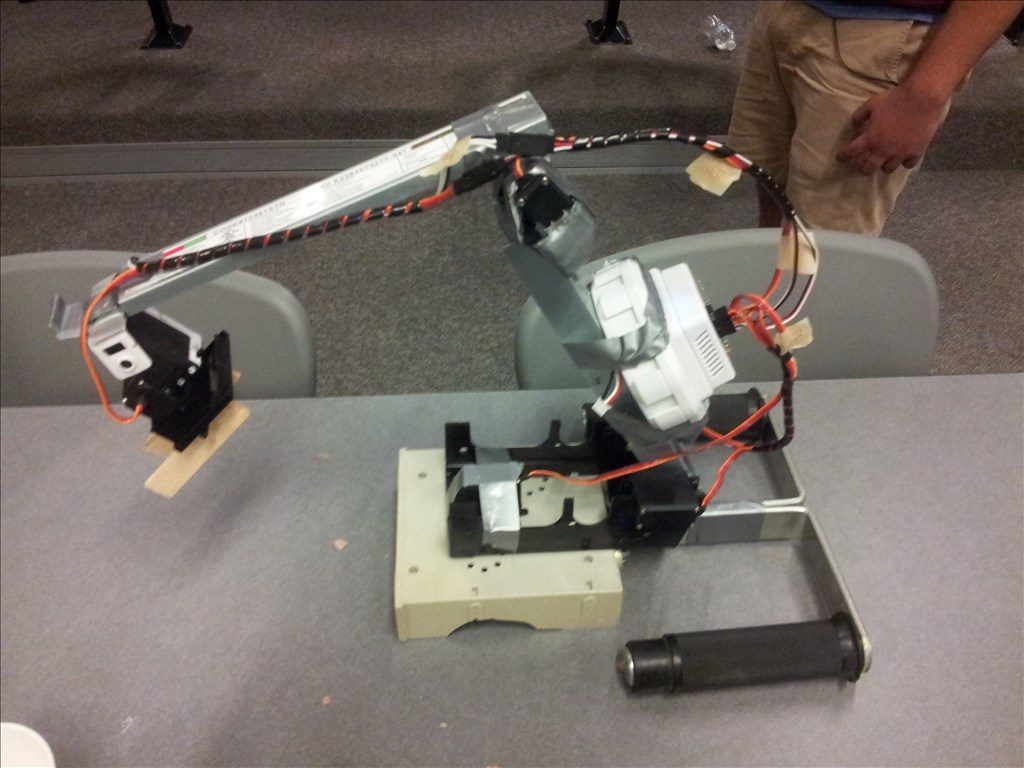
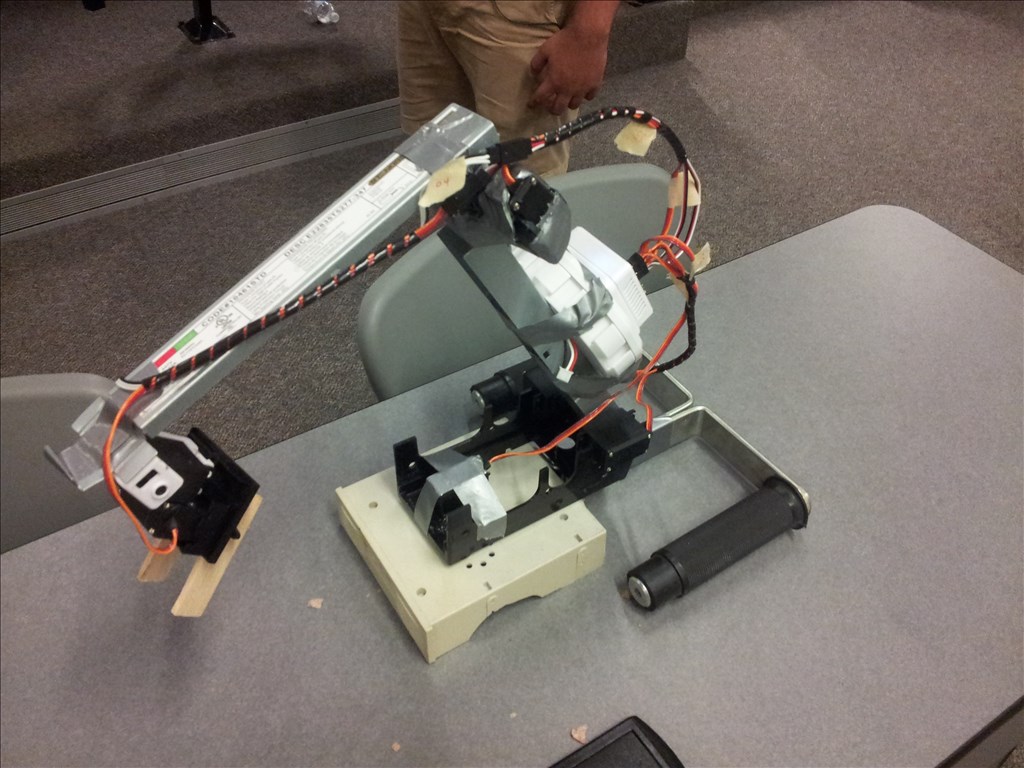
At this year's University of Waterloo Enghack hackathon, 3 of my friends and I created a motion controlled robotic arm using scrap metal, plastic, a myo, a wii remote, and ARC . In the span of 20 hours we created this!
We got 3rd place and won this gift certificate!

I think I'm going to frame it
By Johnnybib
— Last update
Other robots from Synthiam community

Justinratliff's Jd Spock
The first video of my JD Spock testing his 3d printed phaser. JD Spocks 3D printed Star Trek Original Series phaser,...
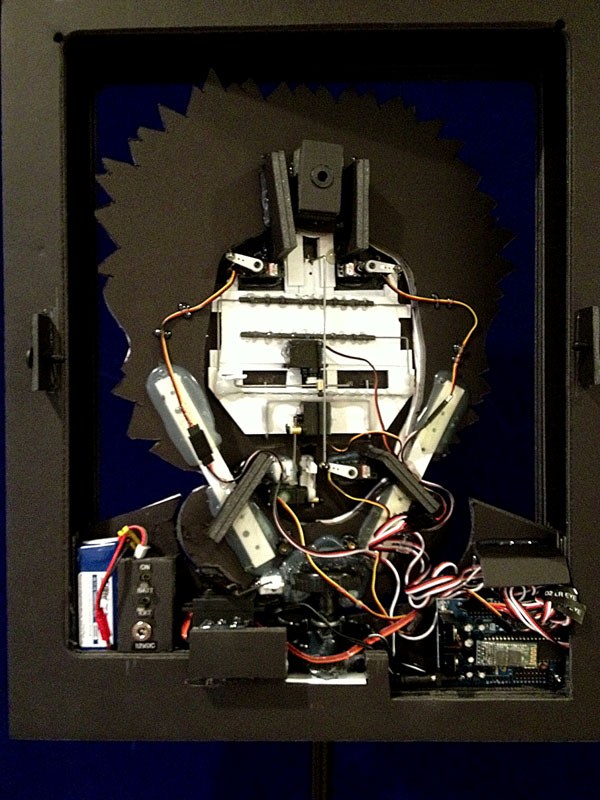
Steve70x7's Robot Albert E
Hi Everyone, Here is some info about Robot Albert E, my 2nd robotics project. Robot Albert E is a life-sized head in a...

DJ's Taught Jd How To Somersault
Dont try this at home!

Awesome James! Great to see your skills being put to good use
I see the servos were a little shaky - i would recommend using the ServoSpeed() command on the INIT script for those servos. Perhaps setting them to a value of 2 or 3 will cushion the shakiness.
When you coming back to work at ez-robot?
I set the servos to a speed of 0.75 to slow them down since the arm would go crazy if you moved too fast. Does the servospeed command even take a double (or floats) as a parameter?
I should be back by August 31st
@James.... You built that arm in 20hrs? Not bad, not bad at all.... Love the duct tape..... LOL. I use it all the time when I need quick assembly...
congrats
Hahaha This thing is held together by duct tape, hot glue, screws and a little bit solder...
But mostly duct tape