At-St. Design a different style of servo or run bevel gear 90 degree at the knee with standard servo. Make it look like the movie. Home security robot. Other idea was a worm gear at the knee spring loaded to absorb shock. Biggest setback is figuring out needed rotational speeds. servo in the foot, cylinder servo for ankle, circular servos for knee and hip.
By MaddogOmega
Discover more robots
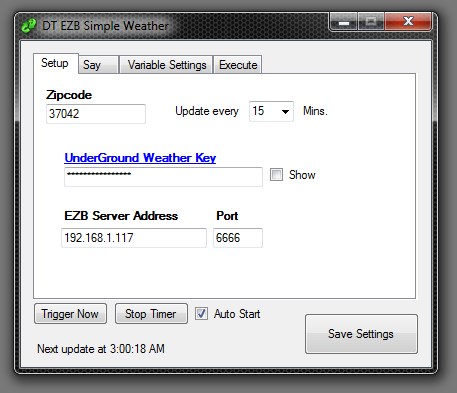
Luis's Dt Ezb Weather For Weather Underground Api
Control EZ-B robots with a Weather Underground API handler: fetch forecasts, speak templates, map variables, and run...

Smarty's Halloween Synthiam - Annabell
Annabell Halloween EZ-Robot, a new spooky custom robot shared with EZ-Robot friends.
Vgosine's Robotic Arm
Robotic arm built with EZ-Bits to assist feeding users, project files available on Synthiam cloud for replication and...
