
RobertL184
Wifi Robot
I got an elechouse TLG10UA03 kit which I have up and working now, but can't get ARC to connect to my EZ-B board yet.
I have verified that I can send and recieve characters thru the wifi TLG10UA03 link using the kits USB to Serial TTL converter with realterm on one computer and telnet to it over wifi on a second computer. Ascii text goes back and forth just fine. So my serial link is up.
I connected it to my robot with a 3.3V regulator as the power source (the ez-b 3.3V supply didn't seem to have enough current to make it work correctly) and I can see the wifi modules web page and get a connect with telnet to it. On telnet I never see anything come from the ez-b board and when I put in the ip address and port in the ARC connect box, ARC seems to indicate that it is connected but my robot does not appear to be recieving any commands. It does take a long time for ARC to come back with the connect which makes me think I am just getting a timeout. Not sure what piece of the puzzle I am missing. I have tried swapping the TX and RX pins between the EZ-B and the wifi TLG10UA03 link but the results are the same both ways. No feedback in a telnet session and ARC just says connected but no real connection is made.
So I am kind of stuck at the moment with that part of my project.
Also I have been looking for a wifi camera that can replace the current wireless one that is part of the ez-b kit.
I was wondering if something link the AI Ball Mini Wifi Spy Camera IP Wireless Camera would work with the ARC software to provide a true wifi robot. ( https://www.thumbdrive.com/aiball/ )
Any suggestion for the camera would be appreciated. I noticed someone had a camera working with X-Bee. Could that approach work with a wifi module? Not sure about interference with two wifi sources on the same frequencies on the robot.
I am trying to get a robot that can roam throughout my whole house and yard.

RX and TX should be crossed over, so RX to TX and TX to RX. Check that is how it's connected up.
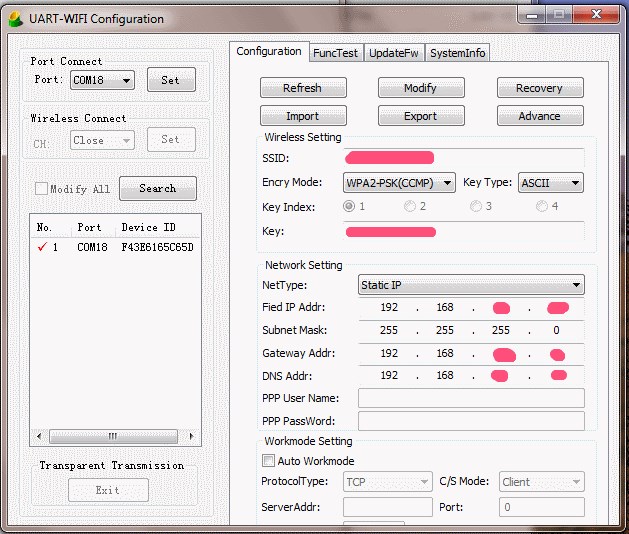
Check the settings of the TLG10UA03.
I didn't get past the 3.3v issue on my tests so never got around to trying to connect but have read that the IP and Port works in ARC. Hopefully it's just a setting issue with the TLG10UA03
Also don't forget to connect the Gnd lead from the 3.3vdc regulator to the Gnd lead that powers your EZ-B.
The ip and port do not work with the elechouse. It adds a greeting which ARC reads as garbage. You need a virtual com port. See other threads on the elechouse for links to virtual com port software that works (i would post a link but i am answering from my phone... It was discussed in a thread within the past few days so scrolling through recent posts should find it).
Alan
Link to the virtual com port that works with elechouse https://www.hw-group.com/products/hw_vsp/index_en.html
Thanks for clarifying that Alan, I'm not sure where I read that the IP and Port worked OK so disregard that
@Rich said "Thanks for clarifying that Alan, I'm not sure where I read that the IP and Port worked OK so disregard that"
I think it was in the Elechouse thread where several of us were trying to get it working. I even reported that I could get ARC to see it that way, but I couldn't get it to talk, it kept disconnecting. I don't know if I posted my analysis of why it didn't work, but I did finally determine it is because it is giving its own greeting before opening the port tot he EZ-B, and ARC is reading something in that greeting as the firmware version being wrong, so it disconnects.
Also, I don't recall if it is the Elechouse WiFi or the USB TTL that came with mine, but one of them the TX and RX are mis-labeled or mis-wired and you don't do a crossover to make it work.
I am almost done with my home office renovation and will be able to get back to working on my robot and will have it on the bench so I can more accurately answer these questions.
Alan
Well the Virtual Com port did make a difference. I think it helped. I got ARC to say connected once, but I am still having difficulties. The robot did not seem to respond to any of the controls. ARC never said disconnected but it was acting that way.
I wish there was something I could type into realterm to get the EZ-B board to respond with its firmware version or something as a debug tool. This would allow me to at least see if I had baud rate issues or if it is a link reliability issue. As I could see if I am really getting data back and forth between my laptop and the ez-b board. There are laptop setting, Wifi router settings, elechouse wifi board settings, and wiring all involved in getting this to work. I think I am having a settings or wiring problem to the elechouse wifi board. I will be going back over my setting and wiring again. It may be a grounding issue. There really needs to be a tutorial done on getting wifi to work. At least with the recommended elechouse board.
Any thoughts on a simple (inexpensive hopefully) wifi camera that would work with ARC? I am starting to dabble with the motion tracking.
I thought about looking for a serial to ethernet adapter instead of the elechouse wifi board and putting a wifi game adapter or router on the robot. This would allow a standard ethernet camera and the ez-b to share the wifi link, but I would rather the robot be smaller and not have all the weight with the extra hardware.
The WiFi board must share the same ground that is used to connect to the EZ-B.