
Hazbot
Australia
Asked
— Edited
Using ARC To Naviagate Robot From A To B And Return
Sorry about TYPO - I mean Navigate...
I'm trying to get the Robot to go from the Lounge room corner to the kitchen - stop for a time period then go back avoiding obstacles along the way. I'm after a way to achieve this using ARC.
One idea I had was to use the recorder but that doesn't work - too much data. Another way is to script him along whilst using the ping obstacle detector (not sure you can do that). Anyway, I'm really keen to achieve this. If there is a cloud example or a series of EZ-B script commands I would really appreciate the example.
Thanks 

You'd require a beacon and gps. Gps isnt entirely accurate enough indoors. So a beacon setup would be most reliable
How about a combination of time intervals and orders with the compass direction that connects the port i2c, I have seen many useful commands like "compass forward" or "compass turn" I think without the compass the robot is doomed to start from a position and heading and simpre exact same but with copass only need a boot right place no matter the direction.
Thanks guys, Both look worth a try, I'll need to buy a compass R2D2 and then come back to you - DJ, how does a beacon and GPS setup work ? Is there something I need to purchase ? eyeroll
DJ - can you explain more about the Beacon set up please ?
I just read a thread about an IR sensor homing in on a beacon - I see GlickClick was also asking for help on this subject. Does anyone know where to can get this setup ?
:)
Not if it relates to an infrared beacon but I think those things work better in a straight line without obstacles, could also decorate your house with glyphs on the walls and recognize rooms or kitchen, but personally I like the idea of ??a robot self that needs no more accessories or adapted scenarios, it better be the robot who suits my house. Would you describe as the tour of the hall to the kitchen or draw a picture? I wonder if it is a journey with many twists or rather direct. It would also be interesting to measure the speed of your robot in seconds, for example: 1m/segundo. Knowing this and timing can make a tour script with sequences of walking straight time sequence, spin, time sequence, [1m is 1000 milliseconds, sleep (1000)]
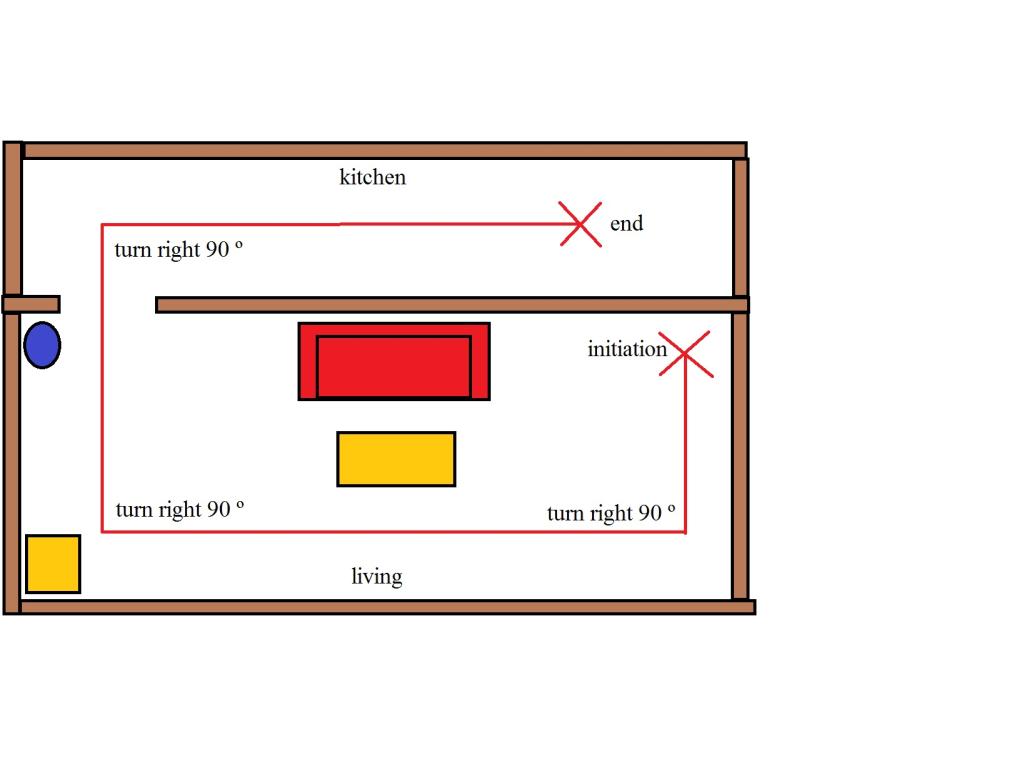
for example this route:
This way of planning the route also requires the measurement of time in milliseconds it takes for your robot to turn 90 or 45 to draw diagonal lines, however this system is not very accurate because they could skate wheel and deviating from the start and trigger a route increasingly erroneous. So I think that the compass could act correct, if not to go in the right direction. And what happens when an object has been moved and hinders the programmed route? Person or is on route? We had the route programming combined with compass, but now we need the actuaccion distance sensors and variables that allow the robot avoid obstacles and return to their path, calculating how far it has to go back to it. I think the best navigation system is the combination of multiple systems.
What about having him roam freely in the general direction... until he finds a glyph on the wall of the room he has been sent to find?