
chi1davey
USA
Asked
— Edited
Tchang Dd1-1 Tank Track Chassis
Hi everyone ..... Is anyone familiar with how to connect the 2.5 Amp Motor Controller to the TCHANG DD1-1 Tank Track Chassis? The only paperwork I received with the DD1-1 is basically a description of the chassis. I appreciate it. Thanks you.
Dave

Send some pictures of what you have. Including a close up of your controller board. I'm using the tank chassis and H-bridge controller I got from this site but I'm assuming they are similar. This H-bridge uses pulse width modulation to control the speed. In the ARC I use the HBridg Movement control and the PWM slider control. There appears to be a bug though where when you open the project, the PWM slider can be half way up but before the movement control will work, the PWM has to be moved to some degree.
Bill
Bill, Thank you for responding, sorry it took a while to get the pictures. I tried to capture them with some detail. I appreciate any help you might give. Thanks again - Dave
Hello chi1davey, if you take an other look at the paper comming with the tank you will se it's pretty clear how to connect the EZ to this unit. No need for the external driver, you connect the 0V and Vcc from EZ to this and use the outputs of the EZ for 1B and 1A. Use the direct digital output control. Naturally, you have to connect both sides because they are independant so, to control this you will have 4 outputs from the EZ. It's functionning for me...
Hi,
Please, I bought one Tchang Dd1-1 Tank Track Chassis but I don't receive a manual, could you help me with simple questions? I would like to make it works with an arduino uno board. Questions:
Thanks for any help.
First: i want to apologize for my awful english, hope you can understand me no matter how many verbs conjugated wrong or how many word i misspelled. (Spanish is my mother language). Second: Sorry for posting in this forum, i don't have any ez-robot board or anything, i'm an Arduino user, but i was searching info about the TChang connection and i found this forum and, once i figured out how to connect the TChang i must share this with the internet community.
The TChang DD1-1 has two half-H Bridge integrated (one in each side), so you don't need a Motor Shield or H-Bridges (like the L293 or L298). You can connect it directly to the Arduino or any arduino-like microcontroller board.
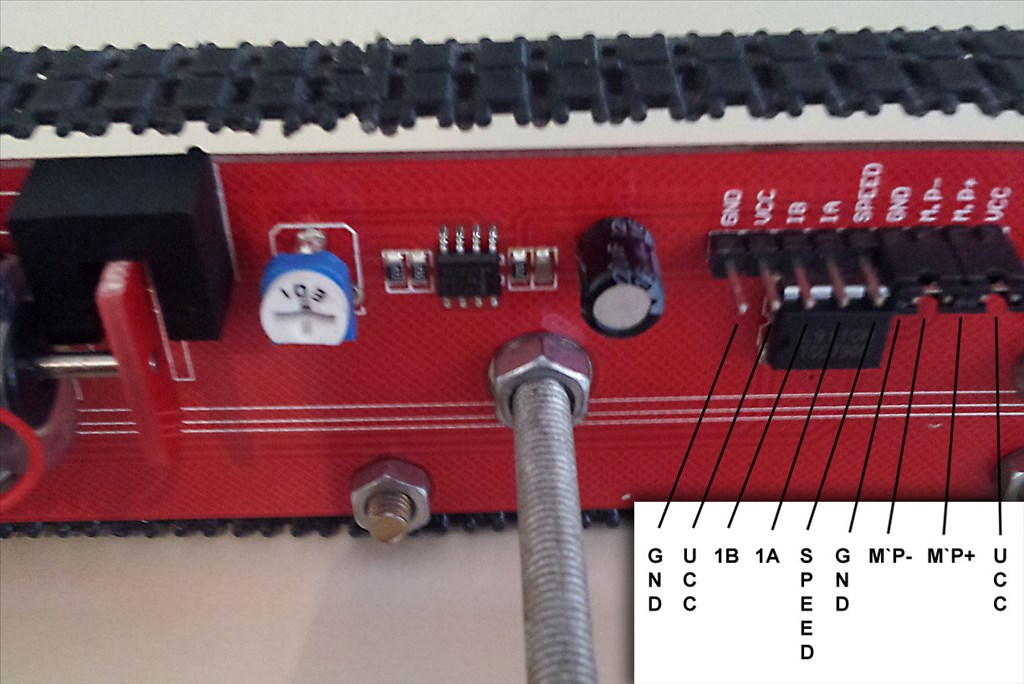
The basic connection is very simple: TCHANG Arduino/Board GND GND VCC 5V IB Digital Pin (Forward) IA Digital Pin (Backward) Speed Optional**
*[/b I asume the yellow motor side is the rear [b]** I think the Speed Pin is only for control. This pin shows the motor encoder data (amount of steps). I don't test it yet, but i think it can be read with a digitalRead.
To move the TChang you must: turn on the digital pin for the IB turn off the digital pin for the IA or vice-versa, depending of the movement you want to do.
Hope this help somebody.
Muchas gracias.
luistavares, you welcome (de nada), if you need an example for arduino, ask me.
Sorry, but just one more question.
what kind of battery do you suggest?
Thanks in advance.