
liupiaop
Questions Of Ar Drone Control And Vision Tracking
Hi everyone,
First, thanks for your great works. I've been searching for a software to work with parrot in my project and ARC is the best one I've found so far.
To introduce myself, I'm a graduate student majoring in architecture design, and my project is to use quadcopters to do the 3D Printing behavior and extend it to printing architecture. My work in the team is to work with AR Drone and prove that it's capable to do some actions. I have played with ARC for a bit and try to understand how it really works.Here are several questions that i'd hoped you guys could help me with.
Vision tracking. I've used the front camera to track colors and objects and it works perfectly. However, when I switch to the bottom one, drone's behavior become messy. I think it's because the drone doesn't know which camera it's using and keep the same tracking behavior when using the front camera. How can I solve this problem?
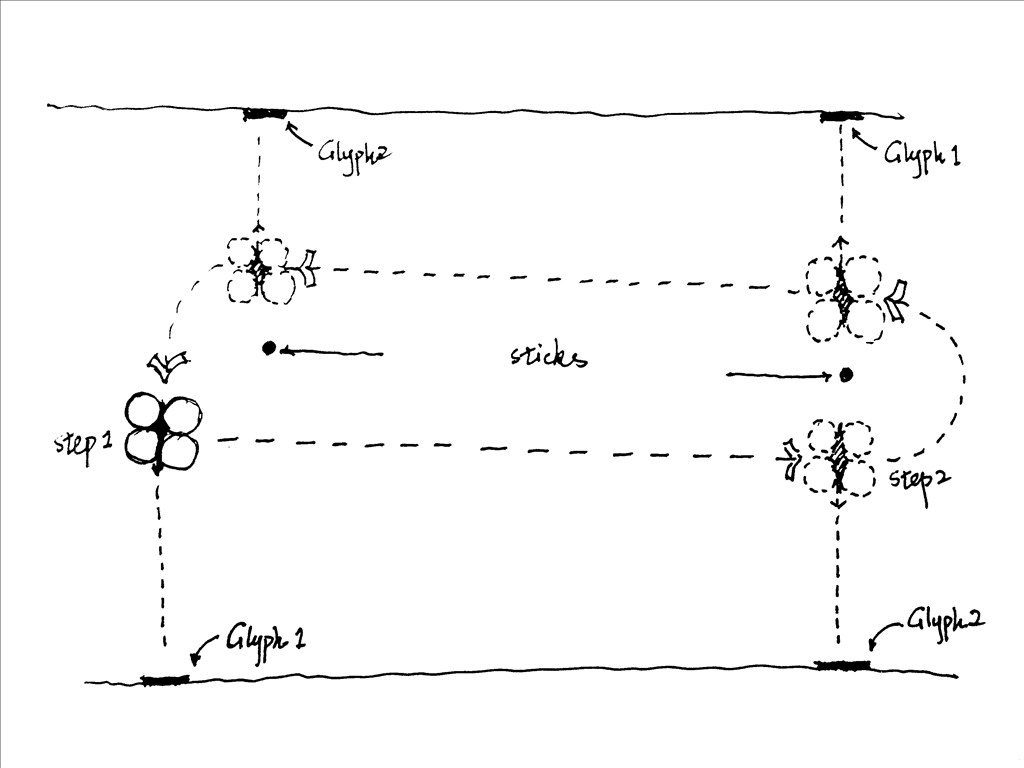
Glyph recognition. This function is fantastic and makes my life much easier. One behavior I want to use this function to realize is to wrap something around two sticks. Here I draw a picture to try to explain it more clearly.
I'm an architect and I can only write some codes in processing. I think writing something in ARC is totally different. In this example, in the scripts of Glyph 1, I'll write RollLeft() to make it execute step 1. And my issue is in the step 2. How can I make the drone roll and rotate at the same time when it sees Glyph 2? When I write RollLeft(), Left(), it doesn't behave as what I thought.
Sorry for my poor English and hope I describe my issues clearly. Any help would be appreciated.
Thanks & Regards LY

Another issue I missed is that how can I use the parameters in the drone's sensor to control its behavior? Like if the drone sees Glyph 3, it will go downwards and hovers when the altitude less than 1m?
Perhaps you can write a function like that will move the drone up and a time delay at the same time. So you now have a relationship with time and velocity.
@Sapper
Thank you for your reply! I'll try this idea tdy or tmr and give u the feedback here.
Well, finally I decided to do them as 2 steps and it also works well. Thanks for your idea anyway.
Here I meet another problem. I want to use $DronePsi to define my drone direction. The range of the value of the variable is from -180 to 180. And when I write the if condition like if($DronePsi < -10 AND $DronePsi > -50), it shows no error. However, when I run this script, it shows Missing String Quotes or Invalid Expression: - Can anyone help me with this problem?
Thanks & Regards, LY
I believe you have to do it more like this
If the first condition is met then it will check the second condition. I dont remember if AND and OR are valid options. It may be && instead of and but I cant remember.
@d.cochran Yes! It works! Thank you so much!
trying to mark it as solved problem thanks guys