
joseph4760

Project Apollo
I have finally decided on what I am going to build. A week ago I went to a Flea market and was able to find a toy that I thought I could convert into an EZ-Robot, so I disassembled the toy, and I started the conversion (EZ-Fied). I have installed the servos for the head, and arms, and with ARC I was able to make them function to my requirements. There is enough room in the chest cavity where I can install the wireless camera. The distance sensor I have yet to decide where I'm going to install it. I have discarded the legs of this toy, and I plan on building a lower body base on the rover 5, to attach to the upper torso to. I would like to have the upper torso rotate 180 degrees, as the rover transitions from forward to reverse, and vice versa. There are some other mod's I would like to do, but I'm concentrating on getting the mechanical system and software to work together as best I can. Any advice or recommendations are welcome.
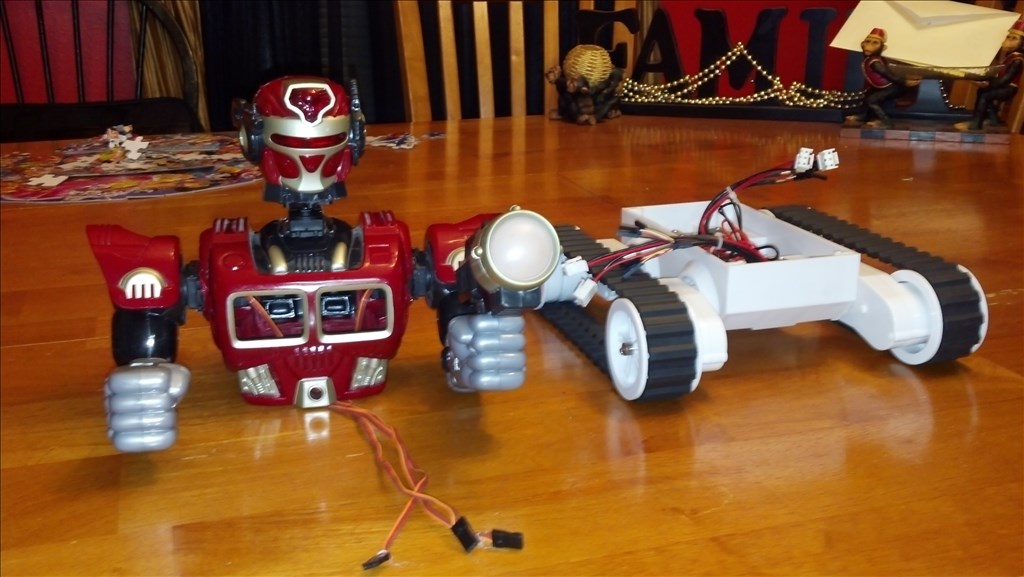


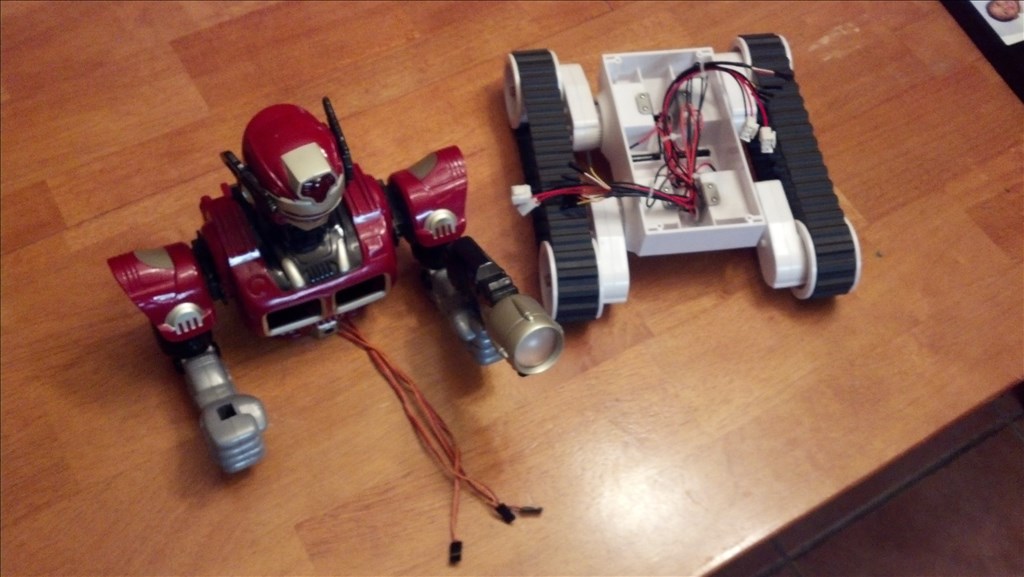

That hand cannon would have made a nice camera but looks way too small.
You could put a nice bright LED in there for a search light.
The LED in the camera is a great idea. I'm thinking of putting LED in the head and having it synced to the voice.
Thanks Copter14
Nice build!