
Andy Roid
New Project Based On Poppy
For my next project I am interested in building a "Poppy Project" style robot. I like the light weight framework and design. It looks strong enough to allow it to carry the EZB and standard servos. I do not want to buy 26) $ 400.00 + servos to build this robot, but can at least try using standard and modified standard servos. I should be able to use these servos to operate the head, upper body, arms and maybe waist to begin with.
The framework design used on "Poppy" is what interests me. Imoov seems a lot heavier and the bulk is a concern. I request feedback as to whether the weight is as heavy as I think. I know the Imoov community is huge and there is a lot of info on the internet. I haven’t really searched to see what is on "Poppy". I don’t mind trying something new if it may work out.
This project will help me develop my 3d design and 3d printing skills. I have my printer running better now and know this new found insanity will get me more addicted to PLA and ABS fumes.
My first step was the arms which I have printed out and begun to look at how to mount the servos. I had planned on using these for an update to a robot I have. I may begin the build instead.
I know Anthony has done some converters for the big servos used on "Poppy". I rather not use them due to the added weight. I would like to modify the stl files used on the robot, but I don’t know how yet. Options are welcomed.
I do not believe this will ever walk, but it would be cool to have it sit, swing its legs, tap it’s feet, etc..
I don’t want to start a dead end project if someone has tried and found it not realistic, but I am not afraid to play in this sandbox for a while. Any opinions?
The Insanity Continues. Ron
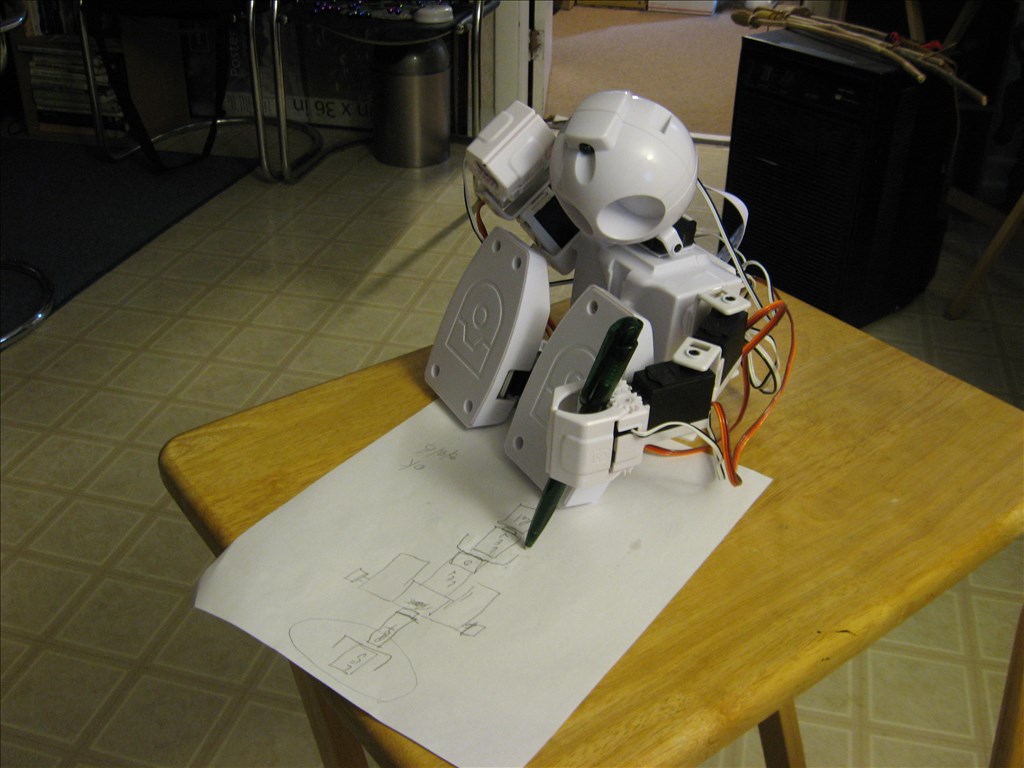
JD assisting with documentation.
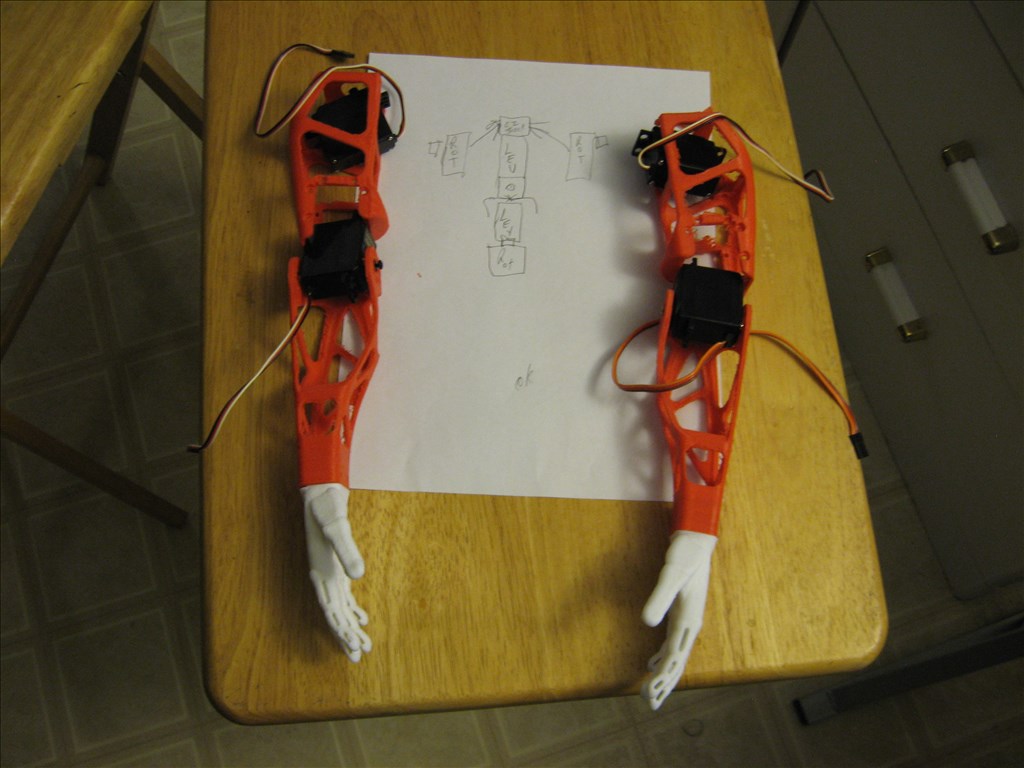
Parts printed for concept.

looking great sofar.