
edison2
Ecuador
Asked
— Edited
Help With Examples C# Does Not Work?
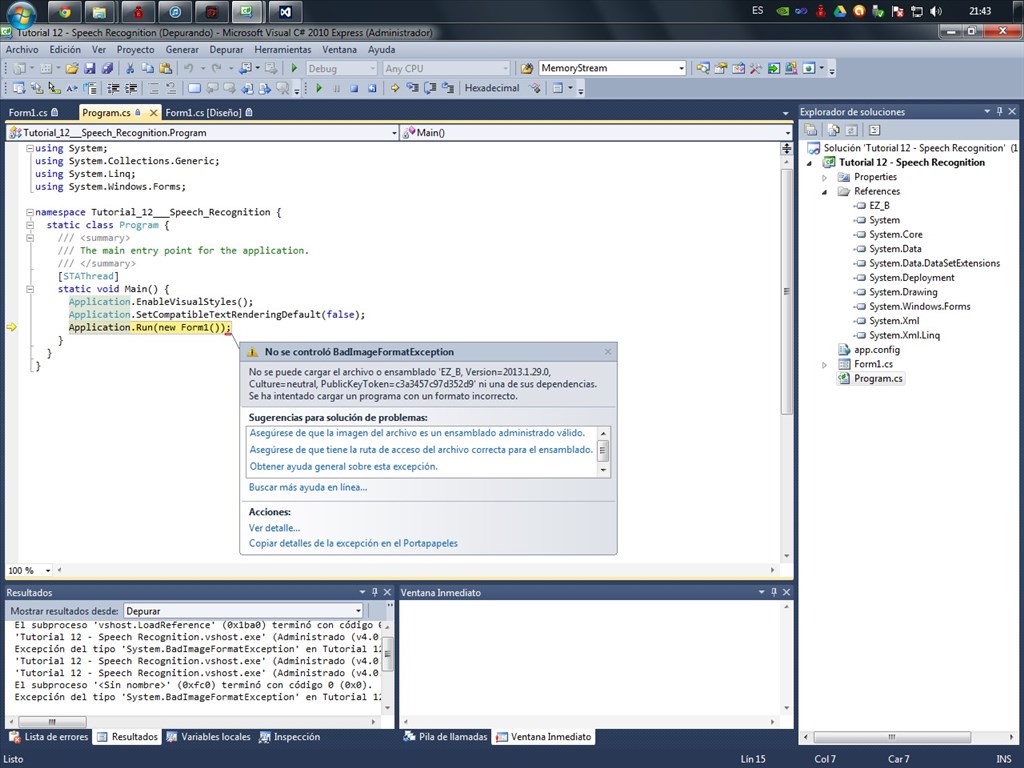
Hi, I am coding in C# for my new robot of star wars, I have done the code of my Kinect and now I need to implement this code to EZ SDK but I have this Error.. Can someone help me?
(I have the last SDK)

Sorry It was my problem, I was debugging in x64... and we should debug in x32
The readme always helps
yep is the second time...
is the second time...
But now I really need help, I am using the example of the Voice Controller Cookie Monster only to test my Ez-B, but when I connect my Ezb to the program I have a problem, Ezb is only connected for 1 minute or less (I can send commands to Ezb) and after that the led of ezb Bluetooth appear connected but the another led starts flashing
I have not change anything from the example, but in ARC EZB works well without problems.
I can not use the other examples because I am using WPF (Windows Presentation Fundation) instead Windows Forms and in the other examples you use another form to connect to EZ-B that only works in Windos Forms.
Please if someone knows how to solve this problem, help me. @DJ? Can you help me?
Ok I have resolved that problem again if someone wants to know how here is my code
if someone wants to know how here is my code
If someone do not understad what I am doing tell me! I will try to explain better