
biomimetic
Help With Calibrating Servos
Dear Users,
I am a new user and just received my first ez robot and having difficulty on the "calibrate servos" step.
I have gone through the tutorials and confirmed that my blue tooth connection to the circuit board is working - in hardware details for my bluetooth devices it tells me I connected to COM8. I have also updated the firmware and it tells me this has been done correctly.
When I select COM8 and hit "calibrate" on the calibrate window i get the following error message:
Received: Disconnected Comm Err: Not Connected BbytesToExpect: 0
Received: Disconnected
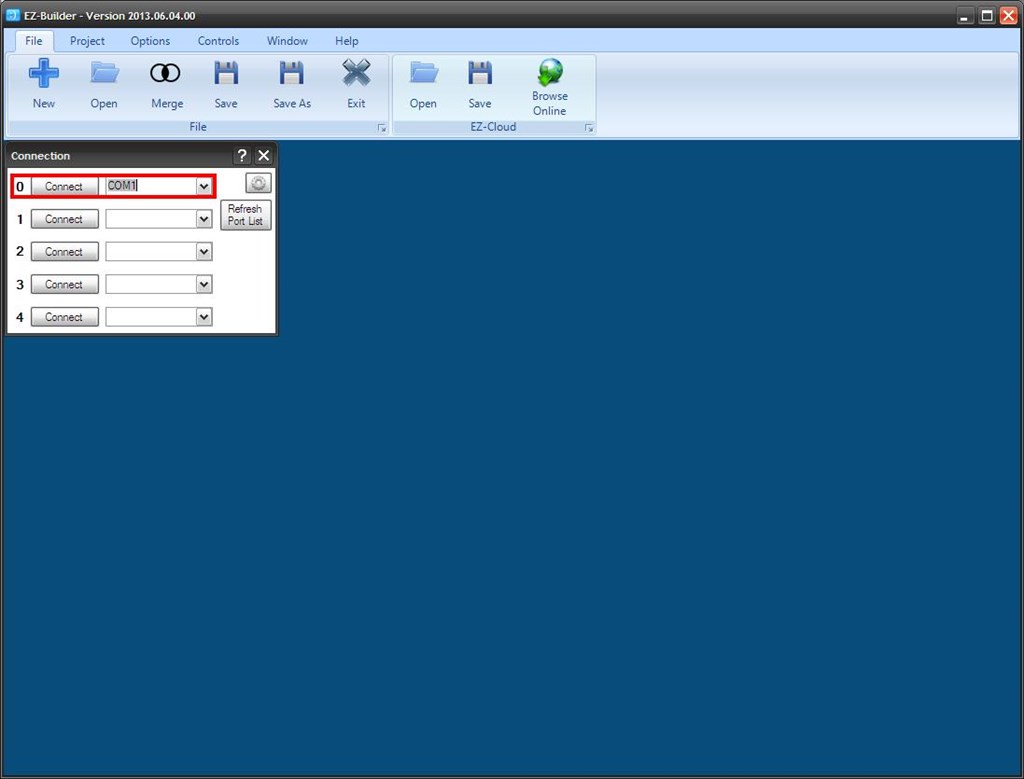
I have one other question.... when I connect which number should I be using? 0 connect 1 connect 2 connect
etc...
I assumed 0 connect and then tried the others but none of them worked.
Is there an obvious mistake I may have made or is there a quick diagnostic I can run to assess if what I think i did correctly is correct?
Thanks in advance for your assistance.

Any connect ion should work but 0 is for the first board. Choose com8 Click connect It should connect.
If it doesn't please post what the debug window says on the error.
Hello,
I'm also getting Comm Err: Not Connected when Calibrating Servos. I did everything like biomimetic and my com port is 3. Please help! This is my error... confused Received: Disconnected Comm Err: Not Connected BbytesToExpect: 0
Received: Disconnected
Thank you!
Have you connected to the board in the connection control? The debug message seems to show that you have not connected to the EZ-B.
Follow my previous post, change the COM port to the correct one for you, and then try.
Connecting the EZ-B to ARC
Change the COM port to the correct port for the EZ-B Click on Connect
Thank you very much for helping me Rich. What I was doing before was running the script first instead of connecting to the com port. Now I know better. You're the BEST! & THANK AGAIN.