
ToddM
USA
Asked
— Edited

Hello, ive been researching ways to animate my robot project. I looked at the Arduino uno which lead me to discover the EZ-B controller and its awesome software! Im excited to dive into all the possibilties. I thought I'd start out simple by controlling 1 12vdc that will make my robot's torso turn left , right etc.
I have this Mini Moto VNH2SP30
It will handle up to 30 amps. Im using a 12 vdc wiper motor with gearbox so this should be plenty to run this motor.
Problem is there is not much info on how to wire the Mini Moto to the EZ-B. I need to use PWM.
Does anyone have a wiring diagram to connect the Mini Moto to an EZ-B ?
Thanks
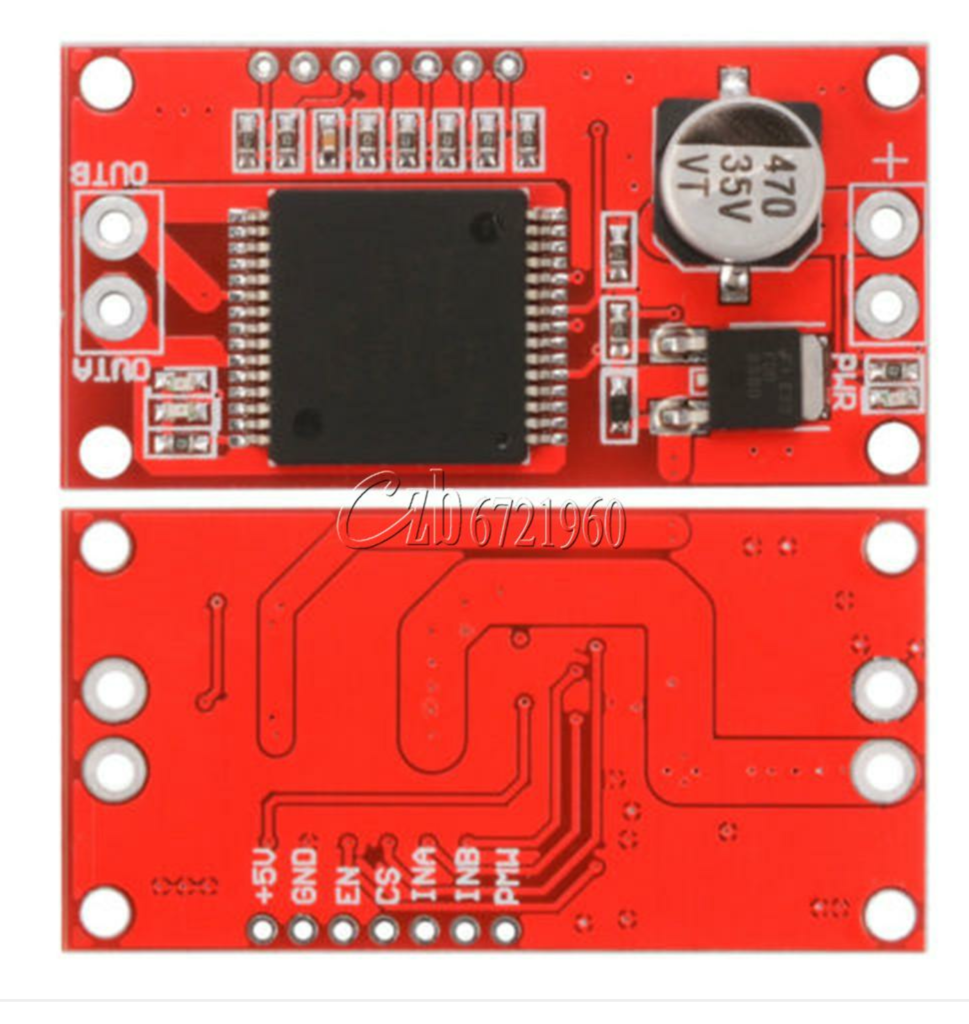


Without a manual on this board this is how I'd wire it up. You're going to need 3 digital ports on the EZB. One port for one direction, one port for opposite direction and one for PWM signal. So lets say your going to use ports D0, D1 and D2:
D0 signal pin goes to INA (one direction) D1 signal pin goes to INB (opposite drection) D2 signal pin goes to PWM (for PWM signal)
Also: Motor feed voltage in from 12vdc power supply goes to PWR + and - 12vdc Motor feed out to motor comes from OUTA and OUTB (no need to worry about polarity) You will need a 5vdc feed and a ground (for logic) attached to +5v and GND. The the ground can come off of any of the DO, D1 or D2 ground pins. The 5vdc can come from DO, D1 or D2 center power pin only if your powering the EZB with 5vdc. That's because power supplied to EZB feeds through to the center pin of the digital ports. If your feeding EZB with 12 vdc (or any other voltage) you can use a buck regulator to step down that voltage down to the needed 5vdc.
Hope this helps.
Thanks Dave. Funny, I was just watching some of your video's on youtube. Awesome work on your B9. The arm mechs you made are incredable. What pot are you using with your torso rotation? All i can find is a ten turn....
I wonder what the current sense pin is used for.....
Thanks again
Hi Todd, Thanks for the kind words. I was using a cheap multi turn (10 turn) pot a while ago for this. Here's one that should work:
www.robotshop.com/en/phidgets-multiturn-rotation-sensor.html
I got fed up with the complicated coding I had to do and lack of speed ramping so I scrapped the motor controller and switched over to a Sabertooth motor controller with a Kangaroo daughter board attached for speed and position control. I also removed the pot and installed a hi rez encoder for feedback. Now I just send a single simple serial command for a position at whatever speed I want and the motor will ramp up and go to any position I want and at my desired speed. The Kangaroo handles all the hard work.
Cool. I'll give it a bit of research Thanks again for your help.
Hi @ToddM
You are getting advice from the Best !
@ToddM
Is that a '66 Mustang in the background? I have rebuilt a couple of '65's when I was younger. Couldn't help but to notice it.
Why yes. It is a 66. Good eye from just a small bit of the car visable in that pic.
looks good. Did you restore it?