
ptp
USA
Asked
— Edited
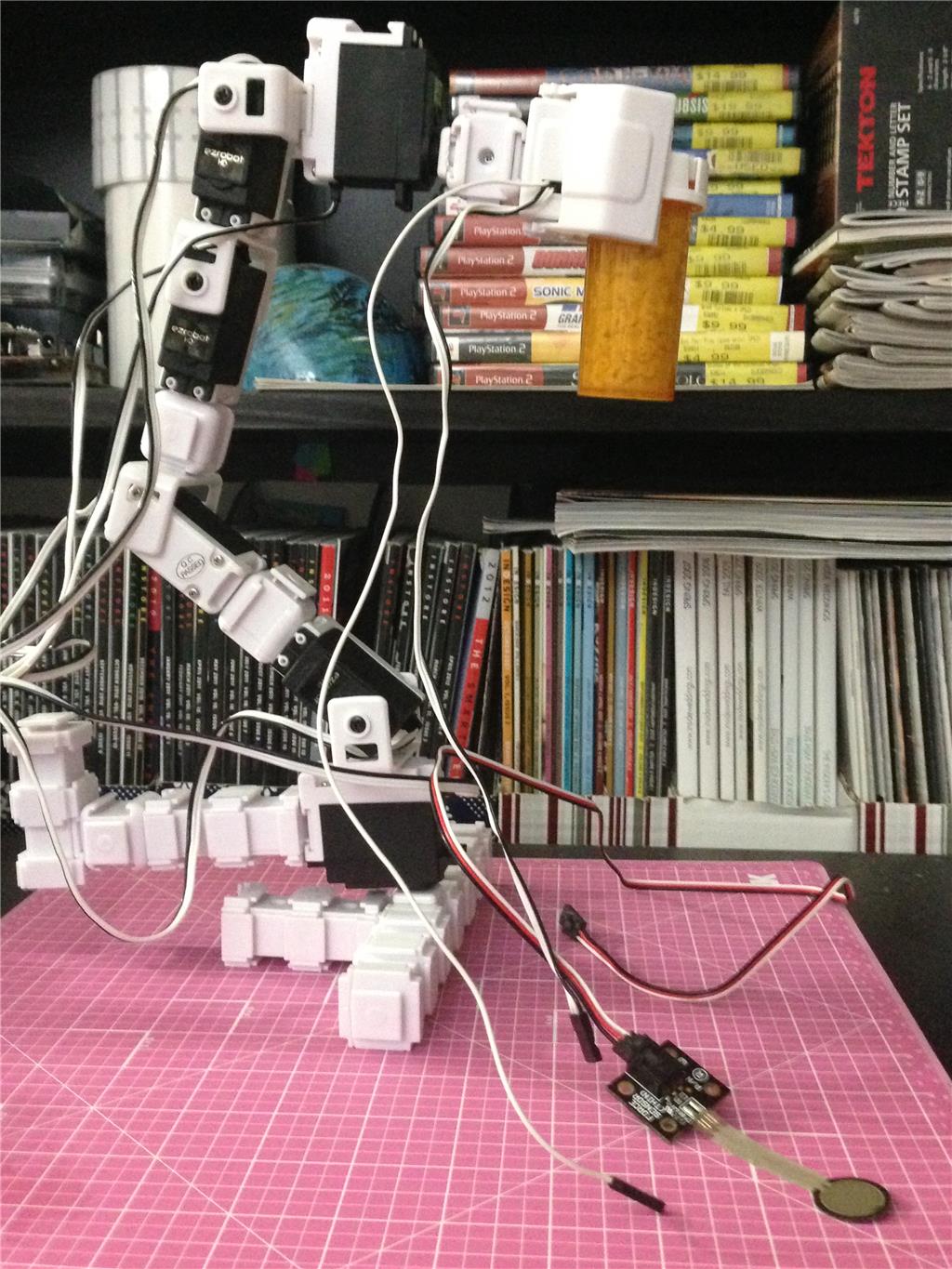
I'm looking for a method to stop the gripper servo when holding an object.

I tried a few options:
- Servo potentiometer analog read
The values are noisy, and needs constant calibration, requires short delays between the readings (flood issue?)
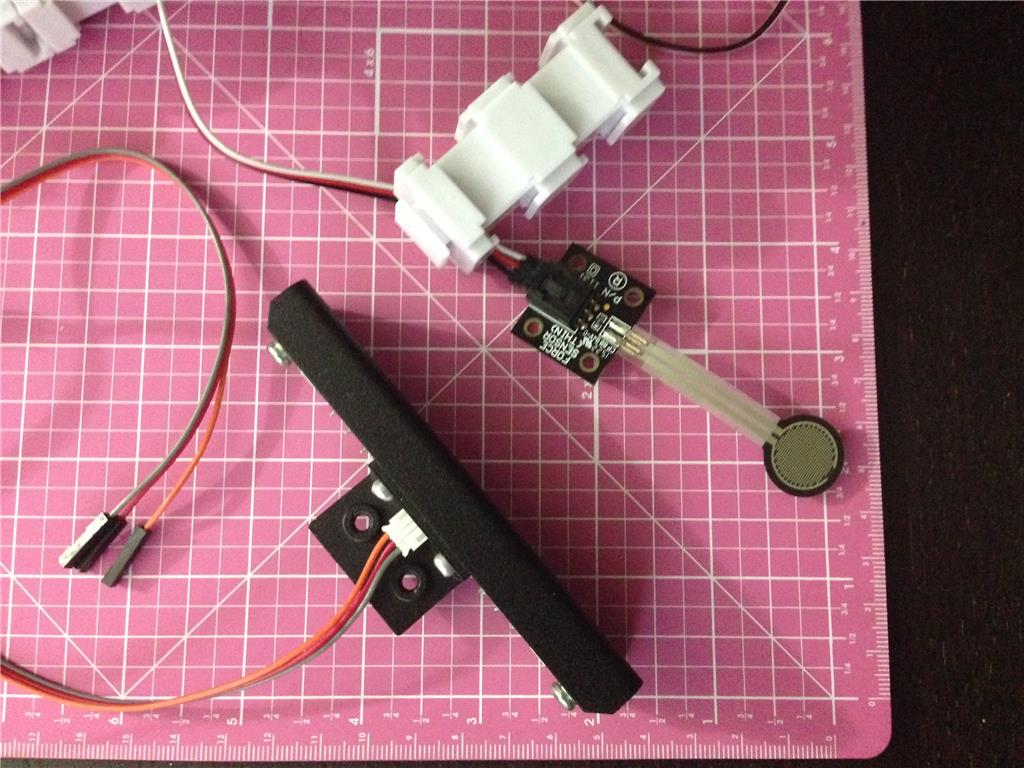
- Force sensor analog read (picture)
The values are noisy and depends on the touching surface.
- Tactile button/pad digital read (picture)
similar to a bumper switch (picture) seems more simple to detect (digital signal) but so far nothing small to fit the gripper.
Any suggestions ?

@ptp - you could see if a SynTouch (BioTac) sensor would work for your application.
@69developer:
Nice tech... i can't see the price neither the availability it must be expensive...
You might consider these:
Precision Coil
for sensing the current going through a wire. If motor stalls current will be high, so define a treshold and that might work.
Good luck,
Greetz