Asked
— Edited
Ez-B With H-Bridge & Sharp Collision Question
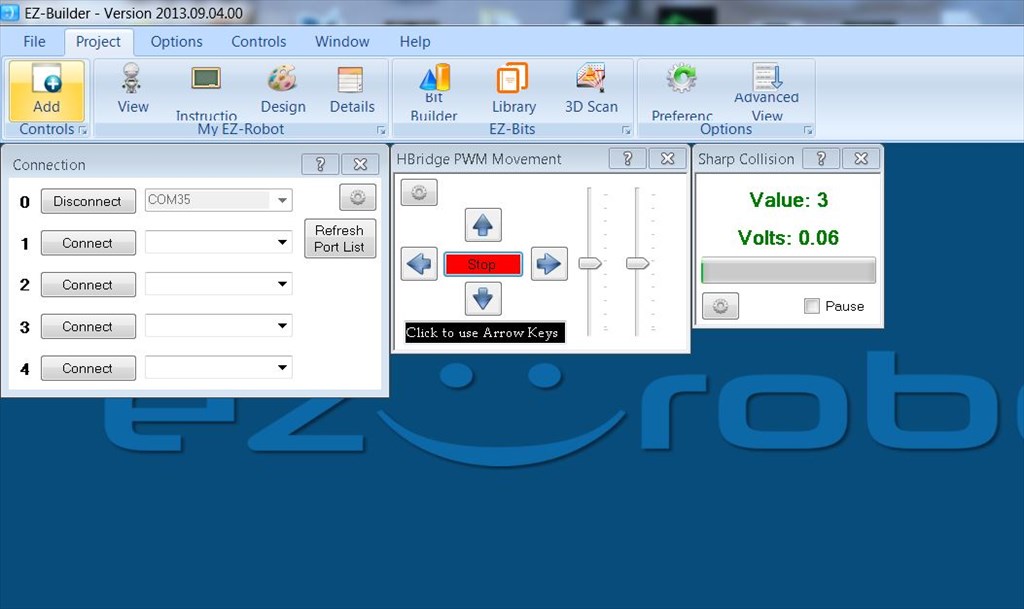
Need some insight here..... When I add just the H-Bridge control to the EZ-B(V3) I can run the H-Bridge direction controls (Forward, Reverse, Left, and Right) without the robot stopping until the Stop button is selected. When a Sharp Collision menu is added then all movement selections still work except the Forward selection. When the forward selection is clicked, the display indicates Green for the selection for 2 seconds then goes out and the robot stops. The ADC port that would normally be used (ADC0) is not even connected for this condition to occur. But for testing I even connected the ADC0 port and still get the same 2 second run Forward then the robot stops.
EDIT Update: If the Pause option is set in the Sharp Collision window then the Forward motion choice on the H-Bridge control works correctly without a 2 second timeout.

First off, the jpg wont display because it has ARC as part of it's filename so the forums reformat it and mess up the url.
Check the settings on the sharp control to make sure that it isn't thinking that it's detected something. I don't use the sharp control since my sensor is a different model no and as a result it doesn't work correctly (which is what started the scripts for roaming with collision detection. It may be that even without a sensor connected it reports a low number which ARC thinks is an object and steps in to alter the movement... I am too tired to remember which way it works with the IR controls. What happens when the IR is connected and nothing is in range? Does it stop movement still?
You may have hit on something Rich. I'm not using a Sharp IR device. It appears to work because when nothing is in range the Value is around 196 and the volts are 3.6. I may switch from using the display and just use the getadc(adcX) in a script of some sort for object avoidance. Thanks for the help and insight Rich.
That sounds like it may not be a 5v sensor, which isn't a problem and can be worked around.
With IR it works the other way around to ultrasonic. I.E. the closer the object the higher the value where ultrasonic is lower the closer the item is (it may be the other way around, I'm struggling to remember as am running on 4 hours sleep in the last 3 days...)
But, some of the IR controls don't work with a different sensor to what DJ used, the radar is one but not sure on the others (at least that's how it was 6 months ago). ADC makes it easier to be honest, just run a script that monitors the sensor and acts accordingly.