
woodylv
USA
Asked
— Edited
Dri0002 Motor Controler
So I got a new motor controller and I have hooked it up.
The directions say that I need a common ground between the Microcontroller and the motor controller.
When I hook the ground up it fries the wire and the controller.
If I don't hook the ground up and I try the PWM control method it doesn't do anything at all.
Any advice
Thanks Michael

Check your wiring, if it's ground it shouldn't be frying anything unless you have a short somewhere or unless you are connecting something that's not ground on either side.
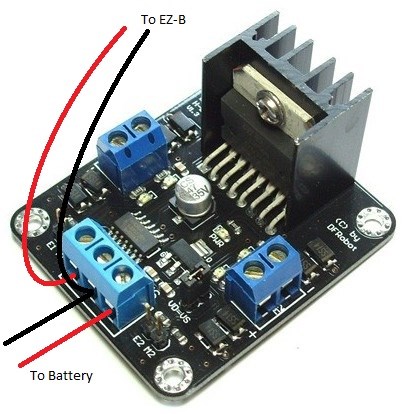
Wire it like this;
Red = VCC Black = Ground
Of those 3 pins, starting on the left hand side pin (E1 & M1 side) Pin 1 - EZ-B VCC Pin 2 - EZ-B Ground & Motor Supply Ground (Common Ground) Pin 3 - Motor Supply VCC
Rich,
Its the negative side of the battery.
I am assuming that it needs this to switch polarity to reverse the motor.
The motor controller takes Battery 12 volts or 5 volts from the microcontroller.
I have it wired to accept the 12 volts but should I still connect the 5 volts from the ez b?
Yes. It requires +5v from the microcontroller, in this case the EZ-B.
Wiring it up is very similar to the L298n H-bridge
So you will need your +5V from the EZ-B to go to the left hand terminal of the 3 along the front, the ground from EZ-B and ground from the motor battery to go to the middle terminal and then your vcc from the motor battery to the right hand terminal.
The H-Bridge will make the motor 1 and motor 2 output terminals high or low depending on what you ask for through the E1, M1, E2 and M2 pins (which should be connected to 4 signal pins of the Ez-B).
Rich,
Ok this is driving me crazy because I know I am missing something stupid and I am mystified as to why I cannot seem to get this done.(I wouldnt consider my self a beginer with electronics. I fixed copiers for 12 years)Hence why this is driving me crazy
Let me fill you in on what I have and I am also going over my wiring.
I have 2 12 volt gel batterys. The positive and negative terminals have home runs to a power distribution termial .
From this terminal I have one 24 volt circut and the 2 12 volt circuts.
I have one 24 volt SabreTooth runing off the 24 volt circut and it is connected to the EZB viia the serial method.
This drives the wheels. Works fine after you gave me the updated starting numbers for the H bridge Movement panel.
Got a Zee Mote hooked up via Bluetooth to control the directions. Works great.
Now the Arms are conected with 2 screw drive actuators which seem to have built in limit switches because if I hook the up direct to the battery they go up and stop and if I reverse the wires they come down and stop.
So now I have the 2A L298 H Bridge (dri0002).
I want to use this to control the arms (I am open to other methods if you have any)
All I want to do is make the arms go up and down when I press a key on the Zee Mote. (Call a script or what ever)
So I hook the L298 Bridge up using the power distribution terminals. Red to Motor VCC Black to Ground
5v from the EZB to VDS and Ground from the EZB to Ground. When I power up it melts the ground wires and I get some puffs of smoke.
Now I am concerned about a few things.
What positon does my jumper need to be in (On or Off)
Should I use a ground from the digital port or the actuall ground pin on the EZB(Next to D14) or should I use the 5v Ground off of my Sabretooth that I am using to power the EZB ?
Could I be creating a power issue by using the power distribution terminal ?
Should I run another home run directly off of the battery?
So as a side note. I have had it hooked up with just the 12 volts going in and I connected the 4 pins (E1,M1,E2,M2) with PWM and I got no response at all. (Which I am assuming is because of the ground).
Rich I need to get this project finished soon. I am willing to purchse something else if it will help make this easier.
Any advice is greatly appreciated. Also I was able to get a USB to TTL converter hooked up and it works great but allot of soldering was required.
Thanks and please ask if you need more info.
Have a good day guys.
Michael
Quick answer (I'm pushed for time). Buy a L298N Dual H-Bridge motor controller like this one (was in the EZ-Robot store but it's currently closed).
A lot of us use the L298N Dual H-Bridge and it's the one I did a tutorial for too, it works right off the bat.
To answer a few questions that are quick to answer though. Ground can be any ground on the EZ-B - I use the ports but any will do since it's a common ground. Without the common ground between the EZ-B and the controller the PWM will not work, because it requires the common ground. It sounds like something is shorted to ground. For the few bucks it'll cost for an L298n it's not worth struggling to figure it out. It may be a bad board, it may be a jumper wrong, it would take some investigation to work it out and, well, like I said is it worth it for a few bucks?
Thanks Rich I got 2 ordered and I will follow your tutorial when I get it.
May need some help on calling the script but we can deal with that later.
Thanks again,
Michael
I Ordered 2 L298N Motor Controllers