
cslater
Continuous Servo Calibration Or Hbridge Question?
Edited Original Post:
Good Afternoon,
I am trying to get a Roli to work for a school club and after spending the majority of my afternoon on this issue I have yet to find a solution for my issue.
Issue: The right side (looking at robots back) continuous rotation servo DC Motor begins turning counterclockwise (reverse) as soon as the robot connects to a computer.
Troubleshooting: I have...
- confirmed connections both to the primary control unit and internally on the HBridge based on what I am seeing online -attempted to operate the unit with the HBridge switch both up and down
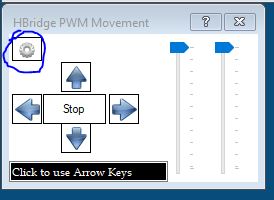
- attempted to determine if there was a way to "calibrate" the servo DC motor through the HBridge PWM Movement panel
Notes: -I can get it to stop turning by using the manual controls within the HBridge PWM Movement Panel by selecting forward which counters the reverse motion. -I have access to another unit (still in box) which I plan to take the servo DC motor from to determine if the servo motor is faulty
Sys Specs: Windows 7, 2Gb Ram, 64 Bit OS, & 2.4Ghz Intel Core 2 Duo
I am missing something here and have watched many videos, read many tutorials and articles and attempted to search the forum. Maybe I am using the wrong terminology in my searches? Any help would be greatly appreciated. Should I switch to a personal home computer with windows 10 to see if that makes a difference in the initial commands issued to the bot upon connection?

Hi @cslater,
Can you show us a couple photos of your internal and EZ-B H-bridge wiring?
You won't need to use a different computer. It seems to be wiring related to me.
Just as a minor correction, Roli has DC Gear motors for it's treads. They aren't called servos because they don't have positional feedback built-in.
Thanks for the tip on the DC Motors, I will try to use that in some searches on the forums as well. Didn't realize I was calling them the wrong thing. I will modify my original post as well.
Thanks for the pictures @cslater!
Your wiring looks good! Next question, do you have the latest version of ARC and are you using the Roli Example that comes with ARC? If so, have you changed any of the pin assignments in the PWM H-Bridge control?
I was using the Roli project but will have to check to see if the version is the most recent. Our computers are managed and therefore the most recent install was about two months ago. However, I don't have the ability to upgrade without bringing it back to our IT department. I don't know what you mean about pin reassignment though so I am gong to answer "Im not sure". Is that through the HBridge control panel? Ill try to bring the gear home tomorrow to continue troubleshooting (forgot it when I left for the weekend!). I really appreciate the help/time so far, Thanks!
Sorry for the lack of response @cslater I haven't had a chance to get back onto forum until now. Yes, you are correct, the gear icon on the H-bridge PWM Movement Panel will show you the pin assignment.
I'm assuming that the pin assignment hasn't been changed but if you are using a computer that has been used by other students the example file could have be modified and saved. This is what it should look like:
If it all matches you can now rule out software settings and wiring and the only thing left to check would be the H-Bridge hardware itself.
Thanks for your continued help @Jeremie, I have confirmed that the pin assignment is as you posted with your screen shot. I have also removed all peripheral servo's (arms, neck) and the camera in hopes of seeing if anything was causing interference but the same issue is still occurring.
Would you be able to describe what I would need to do to review the HBridge or point me to a tutorial you would recommend on the subject? Ill continue to look into this issue in the meantime now that you have been able to confirm wiring and pin assignment.
Again, thanks a lot for your continued help, it is greatly appreciated as I am new to this.
Great @cslater thanks for checking that. Another you could try (if you have some spares) is replacing the 6 wires temporarily with some other wires to eliminate the wiring harness as the possible issue. If the results are the same then you can check the H-Bridge itself.