
Car Bumper Sensor
Cheap sensors
First,
Thank you @toymaker. Oops
I have been working on getting one of these sensor arrays working with a EZ-B V4. The sensor box communicates with bit-bang serial communication. This makes it necessary to use something else like a pic to convert the bit-bang serial to something usable. This is a fun project that involves a lot of head scratching and trial and error.
I used an arduino mini pro to convert the bit-bang stuff to a serial feed that says which sensors have tripped. I plan on working on this further to calculate the distance the object is from the tripped sensor(s). The serial feed is sent to the EZ-B and used to warn the robot that something is in that zone. I think that I will also set a digital pin to high on the arduino when a zone it tripped. This would give me an option to use either serial or digital to communicate with the EZ-B.
This idea came from Tony and he helped by giving me the sensor and the basic structure of the data. Without the later, I probably never would have gotten as far as I have.

Thanks David for the credit, I am @toymaker though!
I had great fun doing the original 4 sense zone car reversing hack. The car reversing unit only cost 10 on ebay and is a high quality build.
You need to intercept the bit-banging serial that goes from the main unit to the LED dashboard display. This is a data packet starting with a sync pulse then 4 bytes (32 bits) each byte is one of the four sense zones. The decoder in the display only uses the 5 LSB (least significant bits) of each of the bytes and this give 32 distance levels for each sense zone. This system makes an amazing wide range robot ranging system. David, well done for having a go at an arduino version.
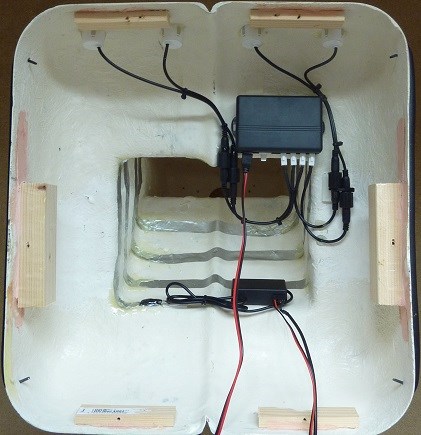
The system installed in the robot base
The system picking up asmall thin piece of plastic trunking in its range
Close up of the robots LCD display when a wide object is 500mm away
Tony
Right now I don't have a reliable test bed as the sensors are just sitting on a desk. When I get a base built I will continue working on getting the distance calculations running and put up pictures, the arduino sketch and an example ARC package. It may be some time before I get to this because the base will be one of the later things that I do in my inmoov build.